
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
สถานะการทำงานของแขนหุ่นยนต์สำหรับเครื่องฉีดพลาสติกมี 3 แบบ คือ แบบแมนนวล แบบหยุด และแบบอัตโนมัติ ซึ่งผู้ปฏิบัติงานสามารถเลือกได้โดยใช้สวิตช์ที่ด้านบนซ้ายของตัวควบคุมแบบมือถือ ในบทนี้ เราจะ อธิบายวิธีการใช้งานและการตั้งโปรแกรมแขนหุ่นยนต์ในการทดสอบ การเขียนโปรแกรม การตั้งค่าพารามิเตอร์ และการทำงาน แบบอัตโนมัติ
เพื่อให้หุ่นยนต์สามารถทำงานได้โดยอัตโนมัติอย่างถูกต้องหลังจากเปิดเครื่อง Origin Position Returned (ORI) จำเป็นต้องขับเคลื่อนหุ่นยนต์กลับสู่ตำแหน่งเริ่มต้นสำหรับแต่ละแกน ดูดและยึดกลับเข้าสู่ตำแหน่งปิด
ในโหมดหยุด ให้กดปุ่ม "Home" หนึ่งครั้ง จากนั้นกดปุ่ม "Start" เพื่อกลับไปยังตำแหน่งเริ่มต้น โดยเรียงลำดับแกน Y1(Y2), X1(X2), Z ตามลำดับ ในขณะเดียวกัน กล่องข้อความจะปรากฏขึ้นเพื่อเตือนคุณว่าคุณกำลังดำเนินการ OPR อยู่ และกลับไปยังจุดเริ่มต้นทั้งหมด โดยตำแหน่งแกนไฟฟ้าแต่ละแกนจะเป็น 0
เมื่อแกน ซัคเกอร์ และฟิกซ์เจอร์ทั้งหมดกลับสู่ตำแหน่งเริ่มต้น จะมีไอคอนอยู่ที่ด้านบนขวาของหน้าจอ  คุณสามารถ ใช้งานโหมดอัตโนมัติและโหมดแมนนวลได้
คุณสามารถ ใช้งานโหมดอัตโนมัติและโหมดแมนนวลได้
คุณไม่สามารถใช้งาน OPR แบบแมนนวล อัตโนมัติ และปรับเปลี่ยนการตั้งค่าได้ โปรดกดปุ่มหยุดหรือปุ่มหยุดฉุกเฉินในกรณีฉุกเฉินเพื่อหยุด OPR
หมุนปุ่มไปทางซ้าย หุ่นยนต์จะเข้าสู่สถานะด้วยตนเอง ดังแสดงด้านล่าง:
5.2.1 การทำงานของแกน
ผู้ใช้ไม่สามารถขยับแขนก่อนจุดกำเนิดที่กำหนดไว้ แต่สามารถใช้งานวาล์วลมได้
 | การควบคุมด้วยลม: แขนหลักขึ้นโดยกดหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: แขนหลักยกขึ้นเมื่อกด การเคลื่อนที่จะหยุดเมื่อกดและปล่อย |
 | การควบคุมด้วยลม: กดแขนหลักลงหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: แขนหลักลงเมื่อกด การเคลื่อนที่จะหยุดเมื่อกดและปล่อย |
 | การควบคุมด้วยลม: ยกแขนรองขึ้นโดยกดหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: แขนรองถูกกด การเคลื่อนที่จะหยุดเมื่อกดแล้วปล่อย |
 | การควบคุมด้วยลม: กดแขนลงหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: กดแขนลง การเคลื่อนที่จะหยุดเมื่อกดแล้วปล่อย |
 | การควบคุมด้วยลม: แขนหลักถอยหลังโดยกดหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: แขนหลักถอยหลังเมื่อกด การเคลื่อนที่จะหยุดเมื่อกดและปล่อย |
 | การควบคุมด้วยลม: แขนหลักไปข้างหน้าโดยกดหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: แขนหลักไปข้างหน้าเมื่อกด การเคลื่อนที่จะหยุดเมื่อกดและปล่อย |
 | การควบคุมด้วยลม: กดแขนย่อยไปด้านหลังหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: แขนย่อยถอยหลังเมื่อกด การเคลื่อนที่จะหยุดเมื่อกดและปล่อย |
 | การควบคุมด้วยลม: ยกแขนไปข้างหน้าโดยกดหนึ่งครั้ง การควบคุมด้วยไฟฟ้า: กดแขนซับไปข้างหน้า การเคลื่อนที่จะหยุดเมื่อกดและปล่อย |
 | การควบคุมด้วยลม: เปลี่ยนท่าทางเป็นแนวตั้งโดยกดเพียงครั้งเดียว การควบคุมด้วยไฟฟ้า: เมื่อกด ท่าทางจะเคลื่อนไปทางแนวตั้ง การเคลื่อนไหวจะหยุดลงเมื่อกดและปล่อย |
 | การควบคุมด้วยระบบลม: ท่าทางของแขนหุ่นยนต์จะหันไปที่ตำแหน่งแนวนอนโดยกดเพียงครั้งเดียว การควบคุมด้วยไฟฟ้า:เมื่อกด ท่าทางของแขนหุ่นยนต์จะหมุนเป็นแนวนอน การเคลื่อนไหวจะหยุดลงเมื่อกดและปล่อย |
 | ข้ามไปใน |
 | ข้ามออก |
5.2.2 การดำเนินการติดตั้ง
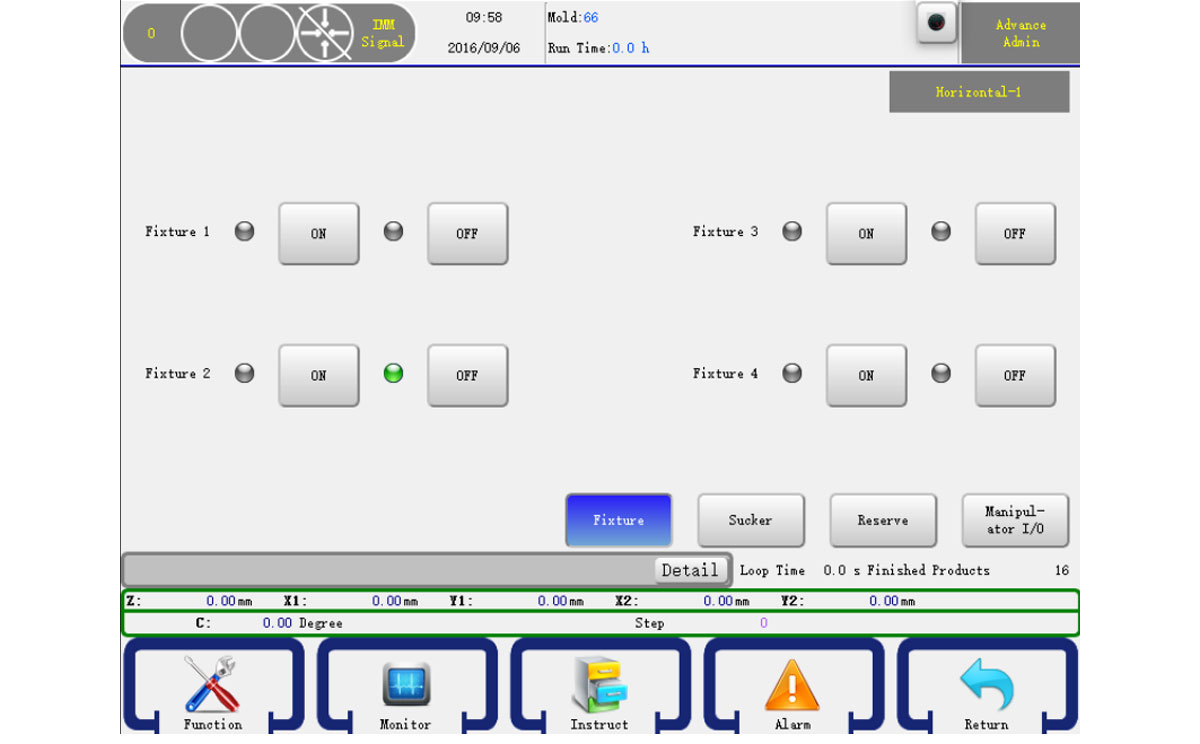
ในหน้าคู่มือ คลิกปุ่ม Fixture ที่ด้านล่างขวาเพื่อเข้าสู่หน้าการติดตั้งด้วยตนเอง ดังแสดงด้านล่าง:
มีโคมไฟสี่ดวง กดปุ่ม เปิด เพื่อเปิดเครื่อง และกดปุ่ม ปิด เพื่อปิดเครื่อง ข้อควรระวัง: สัญญาณอินพุตจะแสดงเป็นสีแดง และสัญญาณเอาต์พุตจะแสดงเป็นสีเขียว หากไม่มีสัญญาณ ไฟแสดงสถานะอินพุตหรือเอาต์พุตจะดับ
5.2.3 การกระทำแบบดูด
ในหน้าคู่มือ ให้คลิกปุ่ม [Sucker] ที่ด้านล่างขวาเพื่อเข้าสู่หน้าคู่มือ ดังแสดงด้านล่าง:
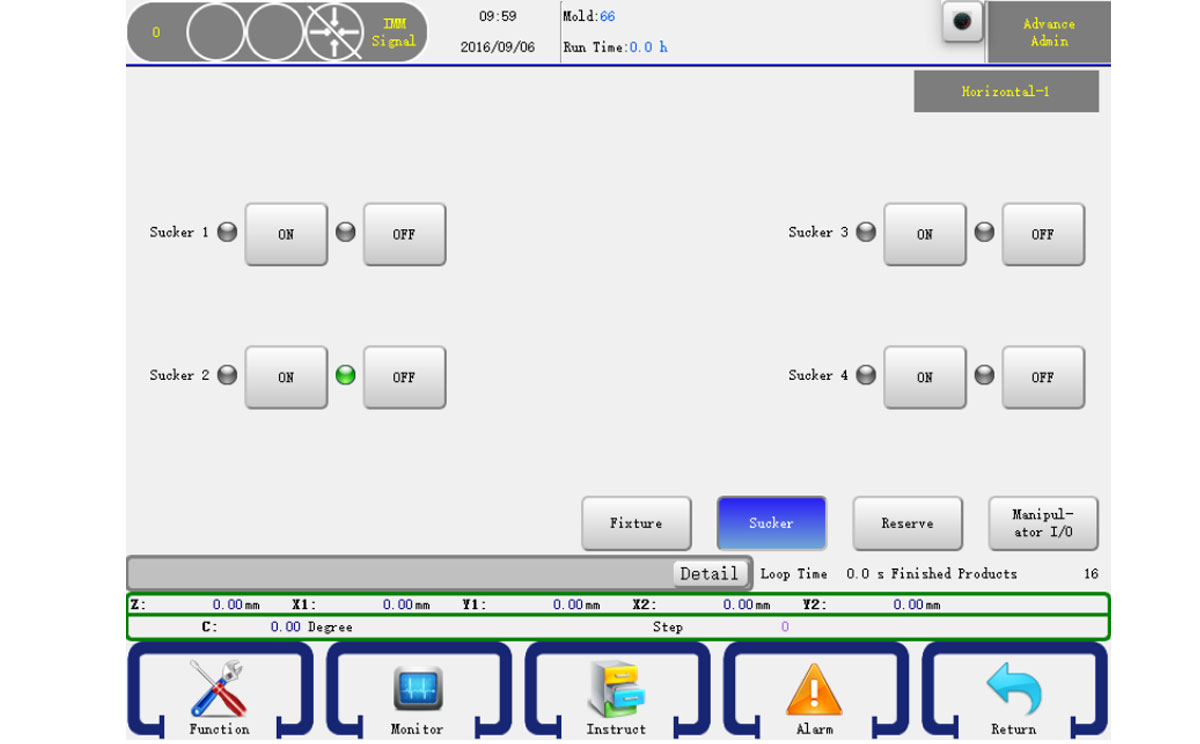
มีสี่ตัวดูด กดปุ่ม ON เพื่อเปิดเครื่อง และกดปุ่ม OFF เพื่อปิดเครื่อง
ข้อควรระวัง: สัญญาณอินพุตจะแสดงเป็นสีแดง และสัญญาณเอาต์พุตจะแสดงเป็นสีเขียว ไฟแสดงสถานะอินพุตหรือเอาต์พุตจะดับลงหากไม่มีสัญญาณ
5.2.4 การดำเนินการเสริม
ในหน้าคู่มือให้คลิกปุ่ม อื่นๆ ที่ด้านล่างขวาเพื่อเข้าสู่หน้าคู่มืออื่นๆ ดังแสดงด้านล่าง:
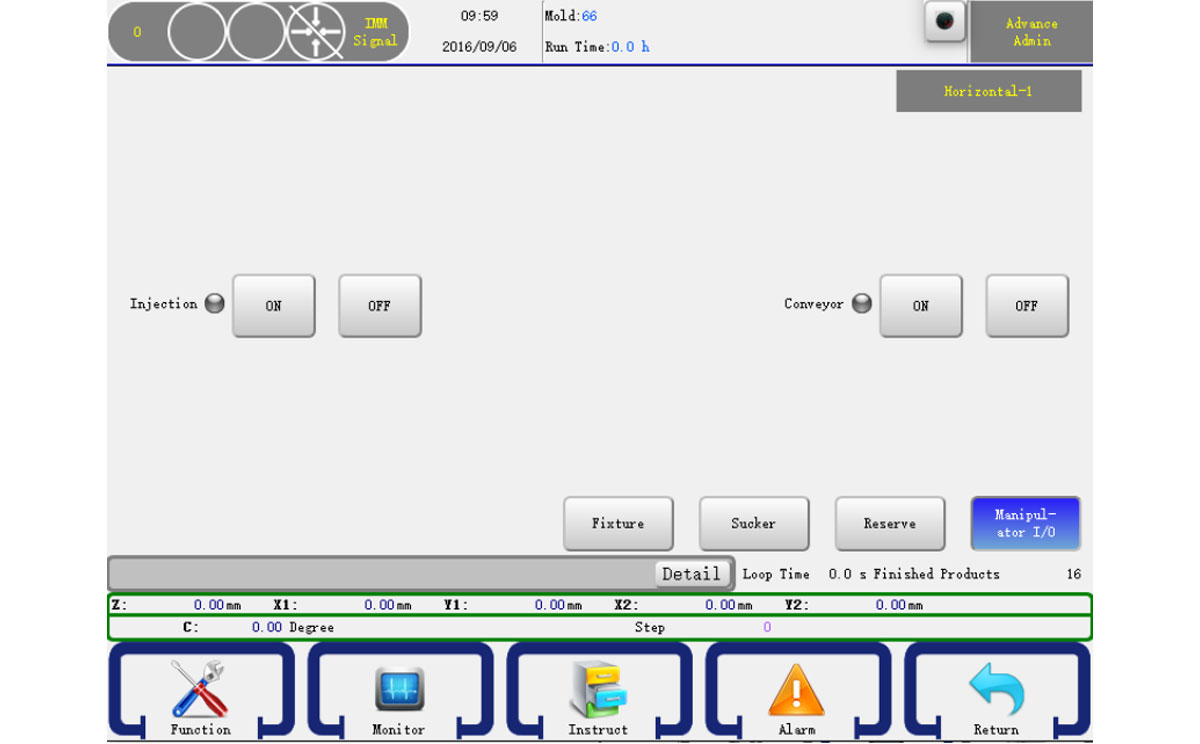
การดำเนินการจะเหมือนกับ Fixture
5.2.5 การดำเนินการสำรอง
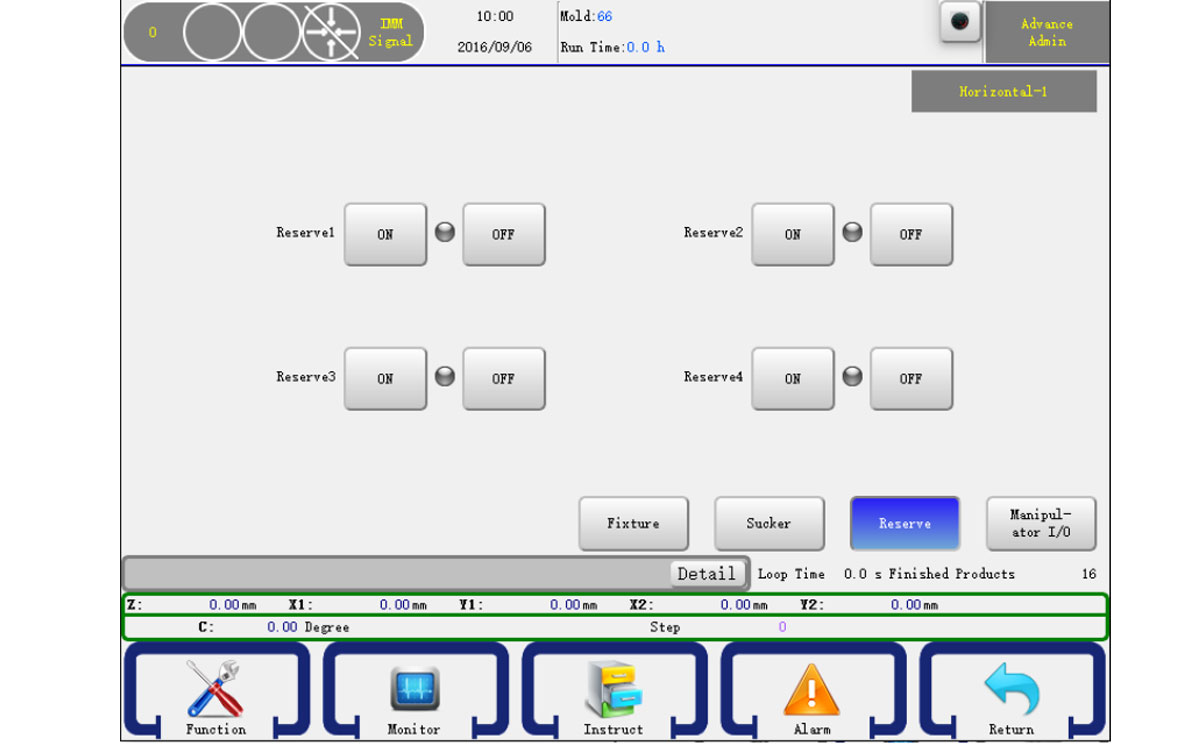
การดำเนินการจะเหมือนกับ Fixture
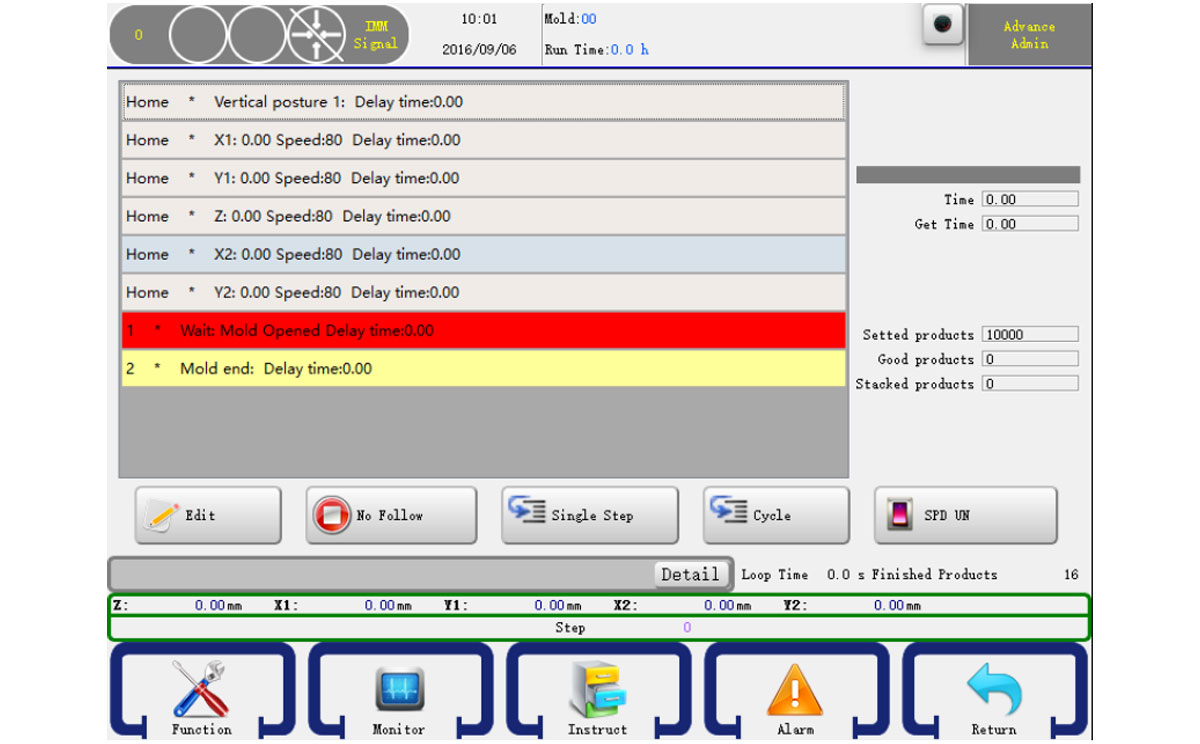
5.3.1 ตรวจสอบสถานะการทำงานอัตโนมัติ
หมุนปุ่มไปทางขวาเพื่อเข้าสู่หน้าการทำงานอัตโนมัติ หุ่นยนต์จะเปลี่ยนเป็น สถานะพร้อมใช้งานอัตโนมัติ ในสถานะนี้ การกดปุ่มเริ่มต้นจะทำให้หุ่นยนต์เปลี่ยนเป็น สถานะการทำงานอัตโนมัติ คุณสามารถตรวจสอบ สถานะการทำงานได้ดังที่แสดงด้านล่าง
5.3.2 ปรับแต่งการกำหนดค่าการทำงาน
ในสถานะการทำงานอัตโนมัติ คุณสามารถปรับเปลี่ยนการตั้งค่าของโปรแกรมได้ เพียงเลือกขั้นตอนแล้วคลิก ปุ่มแก้ไขจะแสดงกล่องโต้ตอบตัวแก้ไข หลังจากที่คุณคลิก "ตกลง" ข้อมูลเหล่านั้นจะได้รับการยอมรับ และในรอบถัดไป ระบบจะรันตามการตั้งค่าของคุณ หากคุณกด "ยกเลิก" เพื่อยกเลิกการดำเนินการ
เพื่อให้แน่ใจว่าการตั้งค่าเหล่านี้จะไม่ทำให้หุ่นยนต์ เครื่องจักร และแม่พิมพ์เสียหายภายในระยะ 5 มม. ตามที่อนุญาต ดังแสดง ด้านล่าง:
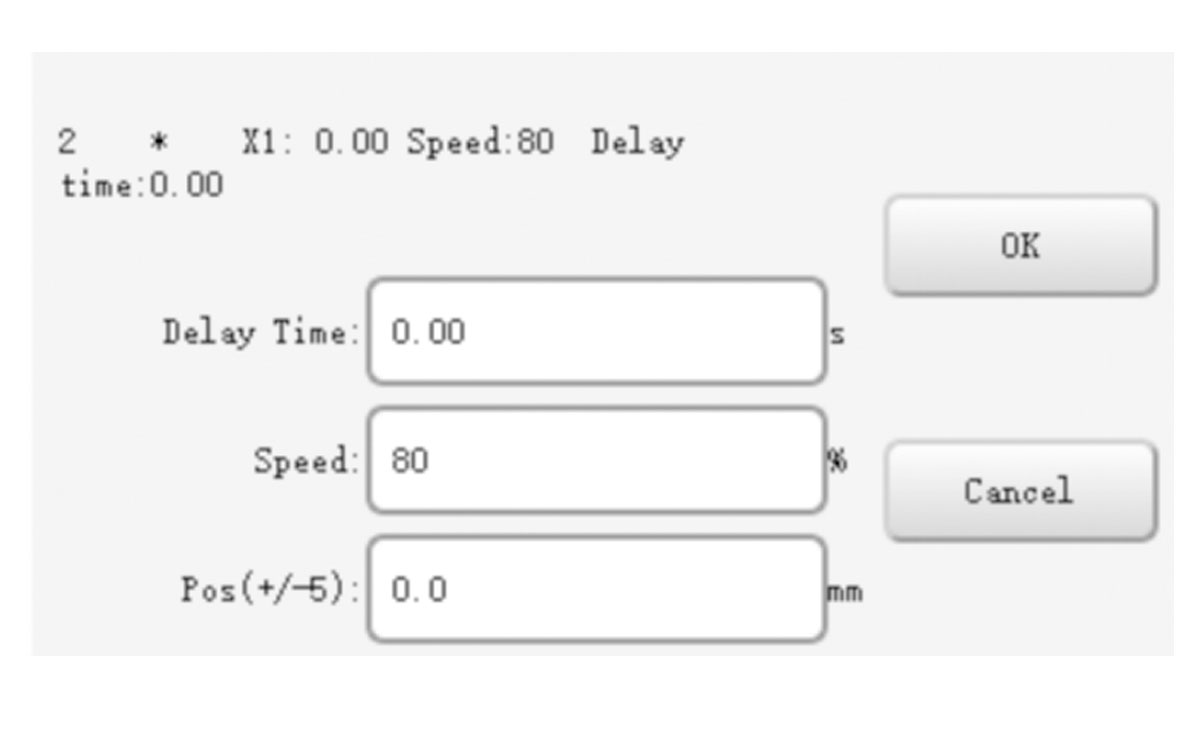
หลังจากที่คุณเสร็จสิ้นเพียงคลิกปุ่มตกลงเพื่อยืนยันการเปลี่ยนแปลงของคุณ
5.3.3 การวิ่งแบบก้าวเดียว
ในสถานะการทำงานอัตโนมัติ คุณสามารถคลิกปุ่มเดียวเพื่อรันขั้นตอนหนึ่งได้ การคลิกอีกครั้งจะรันขั้นตอนถัดไป ไปเรื่อยๆ ฟีเจอร์นี้มีประโยชน์มากในการดีบักโปรแกรมของคุณ
5.3.4 การปรับความเร็ว
คลิกปุ่ม "Speed" เพื่อให้กลายเป็น "Speed display" เพื่อปรับความเร็วโดยรวมโดยกด "Speed adjustment" บนแป้นพิมพ์และแผงที่มุมล่างซ้าย
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
วิศวกร SWITEK เสร็จสิ้นการติดตั้งแมกกาซีนใหม่ในประเทศชิลี
K-Fair 2022, FANUC จัดแสดงโซลูชั่นการฉีดพลาสติกชีวภาพแบบครบวงจร
ระบบ IML ใหม่ของ SWITEK สำหรับการประกอบถังพร้อมด้ามจับเริ่มต้นสำหรับการผลิตจำนวนมาก
ลูกค้าชาวอินเดียกำลังทดสอบระบบ IML ใหม่ของพวกเขาที่มีถัง 1 ลิตร 2 โพรง
NPE 2024 -- WITTMANN นำเสนอโซลูชั่นเพื่อสาธิต "IT's All WITTMANN
ระบบ IML ใหม่สำหรับถ้วย 6 ช่องพร้อมฉลากโลหะของ SWITEK พร้อมสำหรับการผลิตจำนวนมากแล้ว
Fakuma 2023 -- ENGEL จัดแสดงเครื่องฉีดขึ้นรูปแบบไฟฟ้าทั้งหมดพร้อมโซลูชัน IML แบบครบวงจร
การประกอบหุ่นยนต์ IML รุ่นใหม่ของ SWITEK สำหรับการห่อ + ติดฉลากด้านล่างเสร็จเรียบร้อยแล้ว
CONAIR จัดแสดงระบบการให้อาหารแบบรวมศูนย์ใหม่พร้อมเทคโนโลยี AI ในงาน NPE 2024
NPE 2024, ChenHsong Machinery นำเสนอโซลูชั่น IML แบบครบวงจร
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right











