
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
การตรวจสอบและบำรุงรักษาแขนหุ่นยนต์เป็นประจำจะช่วยให้แขนหุ่นยนต์อยู่ในสภาพดีและทำงานได้อย่างปลอดภัย ในบทนี้ คุณจะได้ทราบแนวทางหลักในการบำรุงรักษาแขนหุ่นยนต์สำหรับระบบอัตโนมัติในการฉีดขึ้นรูป
การดำเนินงานบำรุงรักษาสามารถแบ่งตามลักษณะเฉพาะได้ดังนี้: การทำความสะอาด การตรวจสอบ การขันแน่น การปรับแต่ง การตรวจสอบ และการเติม การดำเนินการตรวจสอบจะดำเนินการโดยเจ้าหน้าที่บำรุงรักษาอุปกรณ์ของลูกค้าหรือโดยเจ้าหน้าที่ฝ่ายเทคนิคของบริษัทเรา
การบำรุงรักษาอุปกรณ์ตามเส้นทางเป็นพื้นฐานของการบำรุงรักษาในทุกระดับ ซึ่งเกี่ยวข้องโดยตรงกับความปลอดภัยในการทำงาน การใช้พลังงาน และอายุการใช้งานของชิ้นส่วน ผู้ควบคุมเครื่องจักรเป็นผู้ดำเนินการบำรุงรักษาตามปกติ เนื้อหาหลักของศูนย์ปฏิบัติการประกอบด้วยการทำความสะอาด การเติม ความปลอดภัย และการตรวจสอบ โดยปฏิบัติตามระบบการตรวจสอบสามขั้นตอนก่อนเริ่มใช้งาน ระหว่างการทำงาน และหลังปิดเครื่อง ตรวจสอบความน่าเชื่อถือของกลไกการทำงาน ชิ้นส่วนที่กำลังทำงาน และอุปกรณ์ป้องกันความปลอดภัย รักษาความสะอาดของเครื่องจักรทั้งหมดและชิ้นส่วนประกอบแต่ละชิ้น หล่อลื่นจุดหล่อลื่นให้อยู่ในตำแหน่งที่ถูกต้อง และขันชิ้นส่วนที่หลวมให้แน่น เพื่อให้หุ่นยนต์สามารถใช้งานได้ตามปกติเป็นเวลานานและป้องกันการเกิดความผิดพลาดทางกลไก จำเป็นต้องดำเนินการตรวจสอบแมนิพิวเลเตอร์เป็นประจำ รายการและรอบการบำรุงรักษาและการตรวจสอบมีดังนี้ โปรดดำเนินการอย่างระมัดระวัง
| เครื่องหมายการทำงาน | การตรวจสอบ | จุดตรวจ | วิธี | ตรวจสอบรายการ | กระบวนการ | ||||
|---|---|---|---|---|---|---|---|---|---|
| รายวัน | 1 เดือน | 6 เดือน | 1 ปี | 2 ปี | |||||
| 1 | ♦ | ถ้วยดูด, จิ๊กยึด, ฟังก์ชั่น | การมองเห็น | การมองเห็น | ทำความสะอาด เปลี่ยนใหม่ | ||||
| 2 | ♦ | การรวมคะแนนสองเท่า | การมองเห็น | การมองเห็น | ท่อระบายน้ำ | ||||
| 3 | ♦ | ขั้วต่อการเชื่อมต่อเครื่องฉีดพลาสติก ขั้วต่อสายควบคุมมือ | การมองเห็น | การมองเห็น | เรียบร้อย | ||||
| 4 | ♦ | ฟังก์ชันสวิตช์หยุดฉุกเฉินแบบแมนนวล | การดำเนินการเสร็จสิ้น | การดำเนินการเสร็จสิ้น | แทนที่ | ||||
| 5 | ♦ | รูปลักษณ์การควบคุมด้วยมือ | การมองเห็น | การมองเห็น | การบำรุงรักษาทำความสะอาด | ||||
| 6 | ♦ | กล่องควบคุมพัดลมไฟฟ้า | การมองเห็น | การมองเห็น | การบำรุงรักษาทำความสะอาด | ||||
| 7 | ♦ | แกนนำ, ลูกปืน, สไลด์, ราง, เฟือง และชั้นวาง | การมองเห็น | การมองเห็น | การทำความสะอาด การบำรุงรักษา | ||||
| 8 | ♦ | ร่างกาย | การมองเห็น | การมองเห็น | การบำรุงรักษาทำความสะอาด | ||||
| 9 | ♦ | แรงดันอากาศ | การมองเห็น | การมองเห็น | การปรับเปลี่ยน | ||||
| 11 | ♦ | เข็มขัด | การมองเห็น | การมองเห็น | การปรับเปลี่ยน | ||||
| 12 | ♦ | รางรถไฟ | การมองเห็น | การมองเห็น | การทาน้ำมัน การทำความสะอาด | ||||
| 13 | ♦ | ท่อและสายเคเบิล | การมองเห็น | การมองเห็น | ทำความสะอาด เปลี่ยนใหม่ | ||||
| 14 | ♦ | กระบอกสูบ | การทำงานของโซลินอยด์วาล์ว | การทำงานของโซลินอยด์วาล์ว | เปลี่ยน, ซีล | ||||
| 15 | ♦ | ตัวกรองอากาศและส่วนประกอบ | การมองเห็น | การมองเห็น | ทำความสะอาด เปลี่ยนใหม่ | ||||
| 16 | ♦ | ตัวเก็บเสียง | การมองเห็น | การมองเห็น | ทำความสะอาด เปลี่ยนใหม่ | ||||
| 17 | ♦ | เครื่องกำเนิดสุญญากาศ (ชุดดูด) | ดูดอากาศ | ดูดอากาศ | การทำความสะอาดทดแทน | ||||
| 18 | ♦ | แบตเตอรี่สำรองข้อมูล (ภายในกล่องปฏิบัติการ) | มิเตอร์ไฟฟ้า (ดิจิตอล) | มิเตอร์ไฟฟ้า (ดิจิตอล) | การทดแทน | ||||
หมายเหตุ:การบำรุงรักษาตามปกติที่ดีมีความสำคัญมากกว่าการซ่อมแซมหุ่นยนต์หลังจากชิ้นส่วนเสียหาย การรักษาหุ่นยนต์ให้สะอาดและ หล่อลื่นอย่างดีจะช่วยยืดอายุการใช้งานของแขนหุ่นยนต์และทำให้ทำงานได้อย่างปลอดภัย
14.1.1 การยืนยันฟังก์ชันการติดตั้ง
14.1.2 ตรวจสอบชิ้นส่วนที่หลวม
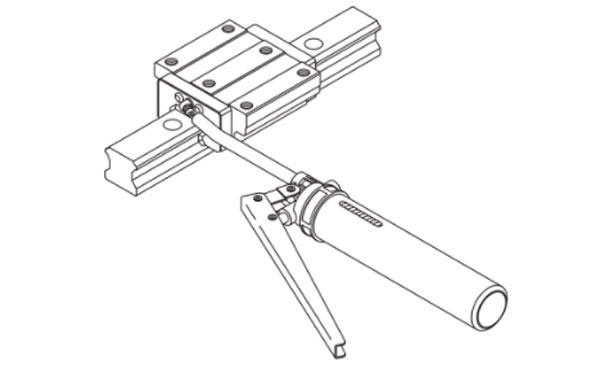
14.1.3 การบำรุงรักษาแกนนำกระบอกสูบและการหล่อลื่นตลับลูกปืน
14.1.4 การหล่อลื่นและการบำรุงรักษารางเลื่อนและสไลเดอร์
14.1.5 ลักษณะที่สะอาดและเป็นระเบียบเรียบร้อย
14.1.6 การตรวจสอบการทำงานของโช้คอัพไฮดรอลิก
14.1.7 การบำรุงรักษาแบบรวมสองจุด
14.1.8 ตรวจสอบอุปกรณ์ติดตั้งและสกรูยึดของลำตัวเครื่องบิน
14.1.9 เกียร์
ตรวจสอบว่าระยะห่างของเกียร์เป็นปกติหรือไม่ (หากสกรูขันหลวม ให้เปลี่ยนสกรูทันทีและทำการปรับดังต่อไปนี้)
14.1.10 สายพานไทม์มิ่ง
การตรวจสอบว่าสายพานไทม์มิ่งอยู่ในสภาพดีหรือไม่ มักตัดสินโดยการทดสอบความตึงของสายพาน
วิธีการเฉพาะมีดังนี้:

เนื่องจากอุปกรณ์นี้ใช้งานร่วมกับแมนิพิวเลเตอร์ จึงจำเป็นต้องหยุดใช้งานเพื่อตรวจสอบทุกวัน โปรดติดต่อฝ่ายบริการด้านเทคนิคของบริษัทเราเกี่ยวกับวิธีการตรวจสอบ เนื้อหา การจัดการ และเนื้อหาอื่นๆ ที่เกี่ยวข้อง
| เลขที่ | รุ่น: | เลขที่: | แผนก: | ||||
|---|---|---|---|---|---|---|---|
| ตรวจสอบเนื้อหา | ข้อกำหนดการตรวจสอบ | วันที่ตรวจสอบ | |||||
| วันที่ 1 ~ วันที่ 31 | |||||||
| 1 | ตัว | สะอาดหรือไม่ | |||||
| 2 | ชุดจุดคู่ | มีน้ำขังหรือไม่ | |||||
| 3 | ถ้วยดูด | ชำรุดหรือไม่ | |||||
| 4 | ท่อลม | ชำรุดหรือพับหรือไม่ | |||||
| 5 | กระบอกยึด | ชำรุดหรือไม่ ไม่ทำงาน? | |||||
| 6 | สกรูยึด | มีตัวไหนหลวมหรือไม่? | |||||
| 7 | สายต่อมอเตอร์ | มีตัวไหนหลวมหรือไม่? | |||||
| 8 | มอเตอร์ทำงาน | มีเสียงผิดปกติหรือไม่ | |||||
| 9 | รางสไลด์, สไลเดอร์, สกรูยึดชั้นวาง | มีเสียงหลวมหรือไม่ (มีเส้นล็อค) | |||||
| 10 | พื้นผิวของรางเลื่อนและชั้นวาง | สึกหรอหรือไม่ | |||||
| 11 | ถ้วยจ่ายน้ำมัน | มีน้ำมันหรือไม่ | |||||
| 12 | ปลั๊กไดรฟ์ | มีปลั๊กหลวมหรือไม่ | |||||
| 13 | โซ่พลังงาน | สึกหรอหรือผิดรูป | |||||
| เครื่องมือตรวจสอบ: | |||||||
| หมายเหตุ: ดำเนินการตรวจสอบเฉพาะจุดตามข้อกำหนดข้างต้น และส่งไปยังฝ่ายอุปกรณ์เพื่อจัดเก็บถาวรหลังจากหนึ่งเดือน สัญลักษณ์การตรวจสอบ: สมบูรณ์: "√"; รอการซ่อมแซม: "x"; อื่นๆ: "O"; | |||||||
| รวม | ประเภท | เวลา | บันทึกเวลาหยุดทำงานที่วางแผนไว้ | ||||
| เหตุผลและเวลาของการหยุดทำงาน | |||||||
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
หุ่นยนต์ IML ใหม่สำหรับคอนเทนเนอร์แบบหลายช่องของ SWITEK กำลังอยู่ระหว่างการทดสอบภายในบริษัท
SW7112DS - หุ่นยนต์ฉีดความเร็วสูงสำหรับภาชนะผนังบางที่ดีที่สุด
Fakuma 2023 -- ดูว่า Spetztekhosnastka Ltd. ผู้จัดแสดง Fakuma จากยูเครนจะคาดหวังอะไร
การประกอบหุ่นยนต์ IML รุ่นใหม่ของ SWITEK สำหรับการห่อ + ติดฉลากด้านล่างเสร็จเรียบร้อยแล้ว
เครื่องฉีดพลาสติกไฮบริดซีรีส์ Jenius รุ่น K-2022 จาก Zhafir On Show
SWITEK กำลังทดสอบระบบ IML ทางเข้าด้านบนสำหรับถังสีขนาด 20 ลิตรภายในบริษัท
Fakuma 2023 -- LK IMM จัดแสดง Serov และเครื่องฉีดพลาสติกไฟฟ้าทั้งหมด
Fakuma 2023 - - Nestal on Show Elion 1750 เครื่องฉีดขึ้นรูปแบบไฟฟ้าทั้งหมดพร้อมโซลูชัน IML แบบครบวงจร
ลูกค้าชาวอินเดียกำลังทดสอบระบบ IML ใหม่ของพวกเขาที่มีถัง 1 ลิตร 2 โพรง
NPE 2024 -- ชาวเฮติจัดแสดงเครื่องฉีดขึ้นรูปแบบสองแท่นรุ่น Jupiter Series รุ่นที่ 5
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right










