
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
คำสำคัญ:หุ่นยนต์ IML; การใช้งานหุ่นยนต์ IML; หุ่นยนต์ติดฉลากในแม่พิมพ์
หน้าจอของจี้ควบคุมคือส่วนติดต่อผู้ใช้ของหุ่นยนต์ IML ซึ่งผู้ปฏิบัติงานจะใช้ในการควบคุมและตั้งโปรแกรมหุ่นยนต์ IML ในบทนี้ เราจะแนะนำวิธีการตั้งโปรแกรมและตั้งค่าพารามิเตอร์ของหุ่นยนต์ IML ด้านล่างนี้คือส่วนติดต่อผู้ใช้ของหุ่นยนต์ IML หลังจากเปิดเครื่องและโหลดระบบแล้ว เพื่อเป็นข้อมูลอ้างอิง:

หมุนปุ่มที่มุมบนซ้ายของโทรศัพท์ไปที่ตำแหน่ง MANU แล้วหน้าจอจะแสดงดังนี้:
(1) การทำงานของแกน
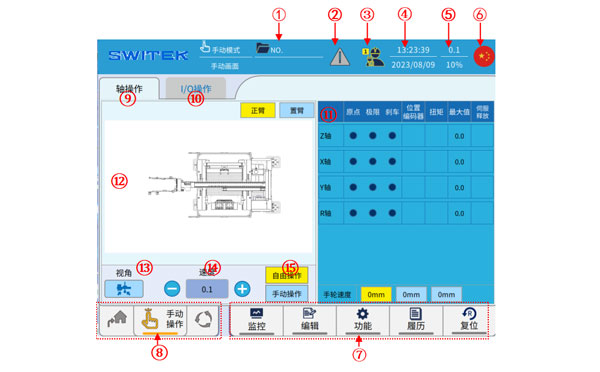
ต่อไปนี้คือรายการฟังก์ชันของปุ่มแต่ละปุ่มบนหน้าจอ:
| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | ชื่อโปรไฟล์ปัจจุบัน | คลิกชื่อไฟล์ที่กำลังใช้งานอยู่เพื่อเข้าสู่หน้าการจัดการไฟล์ และทำการอัปโหลด ดาวน์โหลด อ่าน บันทึก เขียนทับ เปรียบเทียบ และลบไฟล์ |
| (2) | การแสดงผลสัญญาณเตือน | หากขณะนี้สัญญาณเตือนอยู่ในสถานะแจ้งเตือน ไอคอนจะแสดงสถานะ "อ่านข้อมูลแล้ว" ให้คลิกเพื่อดูรายละเอียดการแจ้งเตือน |
| (3) | ระดับผู้ใช้ | ระดับผู้ใช้ปัจจุบันจะแสดงขึ้น คลิกเพื่อสลับผู้ใช้ 1/2/3/4 (ผู้ปฏิบัติงาน/ช่างเทคนิค/ผู้จัดการ/ระดับสูงสุด) และเปลี่ยนรหัสผ่านของผู้ใช้แต่ละคน |
| (4) | เวลาของระบบ | แสดงวันที่และเวลาปัจจุบัน คลิกเพื่อแก้ไขการตั้งค่า |
| (5) | การแสดงความเร็ว | แสดงความเร็วปัจจุบันแบบปรับเอง/แบบอัตโนมัติ คลิกเพื่อปรับความเร็ว |
| (6) | การแสดงผลภาษา | ขณะนี้ระบบแสดงไอคอนภาษา คลิกเพื่อเปลี่ยนภาษาที่แสดงบนหน้าจอ |
| (7) | ปุ่มริบบิ้น | สำหรับรายการฟังก์ชันอื่นๆ ให้คลิกที่ "ดู" เพื่อแก้ไข |
| (8) | การแสดงโหมดการทำงาน | สามารถสลับโหมดการทำงานปัจจุบัน (ต้นฉบับ/ด้วยตนเอง/อัตโนมัติ) ได้โดยใช้ปุ่มหมุนที่มุมบนซ้ายของอุปกรณ์ควบคุมการสอน |
| (9) | การทำงานของแกน | เข้าสู่หน้าการทำงานของแกนเริ่มต้นของระบบ และคุณสามารถสลับไปยังหน้าแสดงผลแกน (13) การทำงานของ IO (14) ได้ |
| (10) | การดำเนินการ I/O | คลิกเพื่อเข้าสู่หน้าจอการทำงานของ IO ซึ่งสามารถแสดงสถานะเปิด/ปิดของอินพุตแบบเรียลไทม์ และสถานะเปิด/ปิดของจุดเอาต์พุตแต่ละจุดได้ |
| (11) | การแสดงผลแกน | บนอินเทอร์เฟซแสดงผลแกน เมื่อคุณใช้ปุ่มด้านขวาเพื่อควบคุมแกน คุณจะสามารถสังเกตสถานะแบบเรียลไทม์ของจุดเริ่มต้น ขีดจำกัด เบรก ตำแหน่งปัจจุบัน แรงบิดของแกน และความเร็วได้ |
| (12) | ปุ่มควบคุมแกน | สลับกับแกนหลักและแกนย่อยของ (8) และ (9) แล้วคลิกเพื่อย้ายแกนแต่ละแกน |
| (13) | การเปลี่ยนมุมมอง | เมื่อเพลาทำงานผ่าน (15) มุมมองจะสลับกัน และสะดวกที่จะเปรียบเทียบกับเครื่องจักรจริง |
| (14) | การสลับความเร็ว | คลิกเพื่อสลับความเร็วในการทำงานด้วยตนเอง ซึ่งแบ่งออกเป็นห้าเกียร์: 0.1/1.0/ต่ำ/ปานกลาง/สูง โปรดทราบว่าคุณไม่สามารถใช้มาตราส่วน 0.1/1.0 เพื่อเลื่อนเพลาโดยไม่กลับไปยังจุดเริ่มต้น |
| (15) | ใช้งานด้วยตนเองได้ฟรี | การทำงานแบบอิสระ: สามารถควบคุมการเคลื่อนที่ของแต่ละแกนได้อย่างอิสระโดยการกดปุ่ม การทำงานแบบแมนนวล: ควบคุมแต่ละแกนให้เคลื่อนที่ไปยังจุดที่กำหนดโดยการกดปุ่ม |
(2) การดำเนินการ I/O
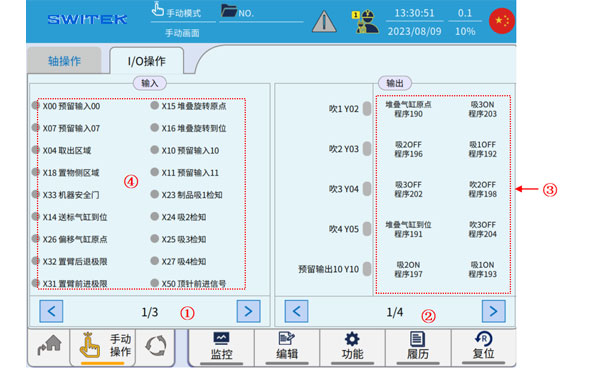
รายการฟังก์ชันการใส่คำอธิบายประกอบแต่ละอย่างบนหน้าจอ:
| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การสลับหน้า | การเปลี่ยนหน้าจอแสดงผลข้อมูลเข้า |
| (2) | การสลับหน้า | การเปลี่ยนหน้าของปุ่มเอาต์พุต |
| (3) | ปุ่มเอาต์พุต | กดปุ่มเปิดใช้งานความปลอดภัยที่ด้านหลังของจี้ควบคุมค้างไว้ จากนั้นคลิกแต่ละปุ่มเพื่อเปิด/ปิดการส่งสัญญาณออก |
| (4) | การแสดงผลอินพุต | แสดงสถานะเปิด/ปิดของสัญญาณอินพุต |
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
Arburg จัดแสดงระบบ IML ถัง 1Litter 2 ช่องพร้อมชุดมือจับในปี 2012
วิศวกร SWITEK เสร็จสิ้นการติดตั้งแมกกาซีนใหม่ในประเทศชิลี
SWITEK ใหม่ 12 ฟันผุ Take Away ถ้วยฝาปิดระบบการกดเริ่มต้นสำหรับการผลิต
SWITEK ใหม่ กล่องสี่เหลี่ยม 2 ช่อง 5 หน้าติดฉลาก IML ระบบ IML ทางเข้าด้านบนที่ติดตั้งสำหรับการผลิต
SWITEK ใหม่ 4 ฟันผุ Burger King Twin-Cups Side Entry ระบบ IML เริ่มต้นขึ้น
K Fair 2022, KraussMaffei เปิดตัวโซลูชั่นแบบครบวงจรสำหรับกรงพลาสติกด้านโลจิสติกส์
NPE 2024 -- WITTMANN นำเสนอโซลูชั่นเพื่อสาธิต "IT's All WITTMANN
K-Fair 2022, FANUC จัดแสดงโซลูชั่นการฉีดพลาสติกชีวภาพแบบครบวงจร
เครื่องฉีดพลาสติกไฮบริดซีรีส์ Jenius รุ่น K-2022 จาก Zhafir On Show
Fakuma 2023 -- LK IMM จัดแสดง Serov และเครื่องฉีดพลาสติกไฟฟ้าทั้งหมด
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right





