
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
คำสำคัญ:หุ่นยนต์ IML; การใช้งานหุ่นยนต์ IML; หุ่นยนต์ติดฉลากในแม่พิมพ์
การตั้งค่าพารามิเตอร์ทางกลของหุ่นยนต์ IML ประกอบด้วยการเลือกโมดูลของหน่วยฟังก์ชัน พารามิเตอร์ทางกลของแกน มอเตอร์เซอร์โว ฯลฯ เพื่อให้มั่นใจว่าหุ่นยนต์ IML ทำงานได้อย่างปลอดภัยและมีประสิทธิภาพ (หมายเหตุ: การแปลนี้พยายามรักษาความหมายและบริบทของต้นฉบับให้มากที่สุดเท่าที่จะเป็นไปได้)
Model Selection

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือกแบบจำลอง | คลิกที่นี่เพื่อเลือกชื่อโหมดที่ต้องการ |
| (2) | บันทึก | หลังจากเลือก (1) รุ่นแล้ว ให้คลิก "บันทึก" เพื่อยืนยันการดำเนินการ |
| (3) | ข้อมูลของรุ่นที่เลือกจะปรากฏขึ้น | ส่วนของข้อมูลนี้แสดงขึ้นสำหรับโมเดลต่างๆ เพื่อช่วยให้คุณแยกแยะความแตกต่างระหว่างโมเดลได้ (ส่วนนี้ของข้อมูลในโมเดลจำเป็นต้องได้รับการดูแลรักษาในระหว่างการผลิตเพื่อรักษาความถูกต้องแม่นยำ) |
โปรดทราบว่า การดำเนินการข้างต้น การเลือกโมเดล - การบันทึก หลังจากที่เนื้อหาของโมเดลเสร็จสมบูรณ์แล้ว จะไม่มีผลทันที จำเป็นต้องกำหนดค่าเริ่มต้นในพารามิเตอร์ทางกล พารามิเตอร์เซอร์โว - การบันทึก จากนั้นจึงรีสตาร์ทระบบ จึงจะมีผล
พารามิเตอร์ทางกล

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | เริ่มต้น | การคลิกจะอ่านข้อมูลเริ่มต้นของพารามิเตอร์ทางกลในไฟล์โมเดลและส่งกลับไปยังหน้าจอที่ (4) |
| (2) | บันทึก | บันทึกการเปลี่ยนแปลงที่มีอยู่ |
| (3) | หน้าหนังสือ | สามารถเลื่อนดูพารามิเตอร์ขึ้นและลงได้ |
| (4) | เนื้อหาพารามิเตอร์เชิงกล |
|
โปรดทราบว่าการแก้ไขพารามิเตอร์ข้างต้นจะไม่ส่งผลทันที แต่ต้องบันทึกก่อน และจะมีผลหลังจากระบบรีสตาร์ทเท่านั้น
พารามิเตอร์การขับเคลื่อน

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | เริ่มต้น | การคลิกจะอ่านข้อมูลเริ่มต้นของพารามิเตอร์ไดรฟ์ในไฟล์โมเดลและส่งข้อมูลย้อนกลับไปยังจอแสดงผลที่ (4) |
| (2) | บันทึก | บันทึกการเปลี่ยนแปลงที่มีอยู่ |
| (3) | หน้าหนังสือ | สามารถเลื่อนดูพารามิเตอร์ขึ้นและลงได้ |
| (4) | เนื้อหาพารามิเตอร์ไดรฟ์ | พารามิเตอร์ของไดรเวอร์แต่ละตัวจะถูกแก้ไขและแสดงผล |
คำแนะนำสำหรับการตั้งค่าพารามิเตอร์ไดรฟ์บางอย่าง:
| เลขที่ | ชื่อ | ผล | ค่าเริ่มต้น | พิสัย | หน่วย | จุดสำคัญของการตั้งค่า | |
|---|---|---|---|---|---|---|---|
| PA1-02 | การเลือกใช้ระบบ INC/ABS | รีบูต | 0 | 0~1 | "0" คือมอเตอร์แบบเพิ่มค่า "1" คือมอเตอร์แบบสัมบูรณ์ | ||
| PA1-04 | ทิศทางการหมุน | รีบูต | 0 | 0~1 | ปรับตั้งเมื่อมอเตอร์หมุนไปในทิศทางที่ผิด | ||
| PA1-13 | โหมดการปรับแต่ง | เรียลไทม์ | 0 | 0~2 | 0 คือโหมดอัตโนมัติ, 1 คือโหมดกึ่งอัตโนมัติ, 2 คือโหมดควบคุมด้วยตนเอง หุ่นยนต์ถูกตั้งค่าไว้ที่ 1 เมื่อจัดส่ง | ||
| PA1-14 | อัตราส่วนของแรงโหลดต่อแรงบิด | เรียลไทม์ | 23.0 | 0.0~300 | ไทม์ส | ||
| PA1-15 | อัตราขยายการปรับจูน | เรียลไทม์ | 7 | 1~40 | |||
| PA1-27 | ค่าจำกัดแรงบิดไปข้างหน้า | เรียลไทม์ | 300 | 0~500 | |||
| PA1-28 | ค่าจำกัดแรงบิดเชิงลบ | เรียลไทม์ | 300 | 0~500 | |||
| PA1-52 | การตั้งค่า S acc/dcc | เรียลไทม์ | 0.0 | 0.0~1000.0 | |||
| PA1-54 | จำนวนคำตอบคำสั่งตำแหน่งที่กำหนดไว้ตายตัว | เรียลไทม์ | 30.0 | 0.00~250.00 | |||
| PA1-55 | ตำแหน่งวงแหวนเกน 1 | เรียลไทม์ | 17 | 1~2000 | |||
| PA1-56 | แหวนเพิ่มความเร็ว 1 | เรียลไทม์ | 5 | 1~2000 | |||
| PA1-58 | เกนฟีดแบ็ก 1 | เรียลไทม์ | 0.000 | 0.000~1.500 | |||
| PA1-59 | การกรองแรงบิด | รีบูต | 0.00 | 0.00~20.00 | |||
| PA1-70 | โหมดฟิลเตอร์รอยบาก | เรียลไทม์ | 1 | 0~1 | เมื่อเป็น 0 การตรวจจับอัตโนมัติ 1 จะใช้ได้กับค่าที่ตั้งไว้ | ||
| PA1-71 | หมายเลขความถี่รอยบากที่ 1 | เรียลไทม์ | 134 | 10~4000 | |||
| PA1-72 | การลดทอนรอยบาก 1 | เรียลไทม์ | 1 | 0~40 | |||
| PA1-73 | ความกว้างของรอยบากที่ 1 | เรียลไทม์ | 2 | 0~3 | |||
| PA1-74 | หมายเลขความถี่รอยบากที่ 2 | เรียลไทม์ | 53 | 10~4000 | |||
| PA1-75 | การลดทอนรอยบาก 2 | เรียลไทม์ | 1 | 0~40 | |||
| PA1-76 | ความกว้างของรอยบากที่ 2 | เรียลไทม์ | 2 | 0~3 | |||
| PA1-78 | ความถี่หมายเลข 0 ของระบบเบรกต้านการสั่นสะเทือน | เรียลไทม์ | 7.0 | 1~300.0 | Hz | ระบบลดแรงสั่นสะเทือนจะมีประสิทธิภาพเมื่อหยุดรถ และจำเป็นต้องวัดแรงสั่นสะเทือนจริงก่อนทำการตั้งค่า | |
| PA1-79 | อัตราส่วนความเฉื่อยของการสั่นสะเทือนของเบรก | เรียลไทม์ | 0 | 0~80 | หากตั้งค่าเป็น 0 PA1-78 จะไม่ถูกต้อง และหากตั้งค่าเป็น 1 PA1-78 จะถูกต้อง | ||
| PA1-80 | ความถี่หมายเลข 1 ของระบบเบรกต้านการสั่นสะเทือน | เรียลไทม์ | 8.0 | 1~300.0 | Hz | ระบบลดแรงสั่นสะเทือนจะมีประสิทธิภาพเมื่อหยุดรถ และจำเป็นต้องวัดแรงสั่นสะเทือนจริงก่อนทำการตั้งค่า | |
| PA1-81 | อัตราส่วนความเฉื่อยของการสั่นสะเทือนของเบรก | เรียลไทม์ | 0 | 0~80 | หากตั้งค่าเป็น 0 แสดงว่า PA1-80 ไม่ถูกต้อง และหากตั้งค่าเป็น 1 แสดงว่า PA1-80 ถูกต้อง | ||
| PA1-94 | โหมดตัวกรองแรงบิด | รีบูต | 0 | 0~1 | ตั้งค่าเป็น 0 และไม่ต้องใช้การกรองแรงบิด | ||
| PA2-64 | เวลาการทำงานของเบรก | เรียลไทม์ | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | การคัดเลือกความต้านทานแบบย้อนกลับ | รีบูต | 1 | 0~1 | ตั้งค่าเป็น 1 เมื่อต่อตัวต้านทานการสร้างใหม่ และ 0 เมื่อไม่ได้ต่อตัวต้านทาน | ||
| PA2-69 | ความเบี่ยงเบนจากค่าที่ตรวจพบ | เรียลไทม์ | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | การตั้งค่าค่าความต้านทานย้อนกลับ | เรียลไทม์ | 30.0 | 3.9~160.0 | Ω | ค่าความต้านทานการสร้างใหม่ถูกตั้งค่าไว้ | |
| PA3-80 | การตั้งค่ากำลังความต้านทานการเกิดใหม่ | เรียลไทม์ | 40 | 1~5000 | W | การตั้งค่าความจุความต้านทานแบบย้อนหลัง | |
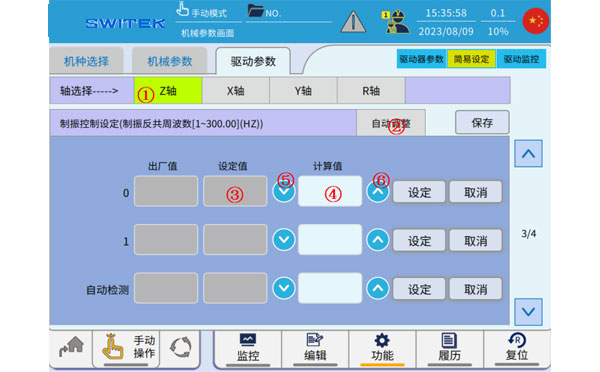
โหมดตั้งค่าและปรับแต่งที่ใช้งานง่าย

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือกแกน | คลิกเพื่อเลือกแกนที่คุณต้องการใช้งาน |
| (2) | ออโต้จูน | เมื่อเครื่องจักรได้รับการปรับแต่งก่อนออกจากโรงงาน พารามิเตอร์การขับเคลื่อนสามารถอนุมานได้ในโหมดนี้ |
| การปรับจูนแบบกึ่งอัตโนมัติ | โหมดการปรับแต่งแบบกึ่งอัตโนมัติ พารามิเตอร์บางตัวถูกกำหนดไว้ตายตัว และพารามิเตอร์บางตัวจะถูกปรับแต่งอย่างละเอียด | |
| การปรับตั้งด้วยตนเอง | พารามิเตอร์การขับเคลื่อนทั้งหมดถูกกำหนดไว้ตายตัว | |
| (3) | กำหนดค่า | อัตราส่วนการขยายที่ปรับแต่งแล้ว ต่อแรงเฉื่อย ต่อแรงบิด ที่ใช้งานอยู่ในปัจจุบัน |
| (4) | ค่าที่คำนวณได้ | ค่าที่ได้จากการคำนวณปัจจุบัน |
| (5) |  | นำค่าที่คำนวณได้ไปใช้กับค่าที่กำหนดไว้ |
| (6) |  | นำค่าที่อยู่ในช่อง "กำหนดค่า" ไปใช้กับช่อง "ค่าที่คำนวณได้" |
| (7) | บันทึก | แก้ไขและบันทึกค่าพารามิเตอร์ของไดรเวอร์ปัจจุบัน |
เมื่อตั้งค่าเป็นอัตโนมัติ คุณสามารถสลับโหมดการปรับจูนของแต่ละแกนบนอินเทอร์เฟซนี้ ปรับอัตราส่วนแรงบิดต่อแรงเฉื่อยและค่าเกนการปรับจูน เพื่อสังเกตผลการทำงานของค่าที่ตั้งไว้แบบเรียลไทม์และค้นหาการตั้งค่าพารามิเตอร์ที่เหมาะสมยิ่งขึ้น
เมื่อตั้งค่าเป็นโหมดปรับจูนอัตโนมัติ พารามิเตอร์อัตราส่วนแรงบิดเฉื่อย PA1-14 จะถูกวัดแบบเรียลไทม์
หน้าที่หลักของโหมดปรับจูนอัตโนมัติคือการปรับค่าโดยอัตโนมัติตามผลการทำงานเมื่อไม่ทราบพารามิเตอร์การขับขี่ที่เหมาะสมในขั้นตอนเริ่มต้นของการแก้ไขข้อบกพร่อง จนกว่าผลการทำงานจะดีและเสถียร และค่าอัตราส่วนแรงบิดต่อแรงเฉื่อยจะมีแนวโน้มคงที่
เมื่อการทำงานมีเสถียรภาพแล้ว ให้เปลี่ยนไปใช้โหมดการปรับแต่งกึ่งอัตโนมัติ ตั้งค่าพารามิเตอร์ด้วยตนเอง บันทึก ปิดเครื่อง แล้วเปิดเครื่องใหม่อีกครั้งจนกว่าพารามิเตอร์จะมีผล ในโหมดการปรับแต่งกึ่งอัตโนมัติ พารามิเตอร์หลัก เช่น "อัตราส่วนแรงบิดเฉื่อย" จะถูกกำหนดไว้ตายตัว และพารามิเตอร์เซอร์โวบางส่วนจะยังคงถูกปรับแบบเรียลไทม์เพื่อให้มั่นใจว่าการทำงานราบรื่น
เมื่อตั้งค่าเป็น "โหมดปรับแต่งด้วยตนเอง" พารามิเตอร์ของเซอร์โวทั้งหมดจะถูกกำหนดตายตัว โหมดนี้ต้องการความแม่นยำสูงในการตั้งค่าพารามิเตอร์
ตั้งค่าได้ง่าย - การตั้งค่าฟิลเตอร์รอยบาก

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือกแกน | คลิกเพื่อเลือกแกนที่คุณต้องการใช้งาน |
| (2) | การกรองแบบปรับได้ | ฟังก์ชันการกรองแบบปรับได้ (เปิด/ปิด) |
| (3) | พารามิเตอร์ที่เกี่ยวข้องกับการกรองรอยบาก | พารามิเตอร์ต่างๆ ที่เกี่ยวข้องกับฟังก์ชันการกรองแบบรอยบาก |
หากมีเสียงดังผิดปกติในเซอร์โวขณะเปิดใช้งานหรือระหว่างการทำงาน สามารถตั้งค่าตัวกรองแบบปรับได้เป็นเปิดใช้งาน ซึ่งจะกำจัดเสียงผิดปกติที่เกิดจากการสั่นสะเทือนทางกลโดยอัตโนมัติ และสามารถกำจัดจุดสั่นสะเทือนได้สองจุด เมื่อตั้งค่าความถี่เรโซแนนซ์เป็น 4000 จะไม่มี จุดสั่นสะเทือน
ตั้งค่าได้ง่าย - การตั้งค่าการควบคุมการสั่นสะเทือน
| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือกแกน | เลือกแกนที่คุณต้องการใช้งาน |
| (2) | ปรับอัตโนมัติ | ระบบจะตรวจจับพารามิเตอร์ที่เกี่ยวข้องกับการควบคุมการสั่นสะเทือนโดยอัตโนมัติ |
| (3) | กำหนดค่า | พารามิเตอร์การควบคุมการสั่นสะเทือนที่ใช้งานอยู่ในปัจจุบัน |
| (4) | ค่าที่คำนวณได้ | คำนวณค่าตัวเลขที่ได้มา |
| (5) | | นำค่าที่คำนวณได้ไปใช้กับค่าที่กำหนดไว้ |
| (6) | | นำค่าที่อยู่ในช่อง "กำหนดค่า" ไปใช้กับช่อง "ค่าที่คำนวณได้" |
การตั้งค่าการควบคุมการสั่นสะเทือน: มีประสิทธิภาพในการลดการสั่นสะเทือนเมื่อหยุดรถ โดยทั่วไปค่าที่ตั้งไว้จะอยู่ที่ 5-10 ค่าการตั้งค่า สามารถคำนวณได้อย่างคร่าวๆ จากรูปคลื่นแรงบิด และอาจตั้งค่าให้ถูกต้องได้ยากในครั้งแรก
ตั้งค่าได้ง่าย - การตรวจจับการชน

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือกแกน | การเลือกแกนเพื่อตั้งค่า |
| (2) | การเปลี่ยนแปลงแรงบิดสูงสุด |
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
SWITEK กำลังทดสอบระบบ IML ทางเข้าด้านบนสำหรับถังสีขนาด 20 ลิตรภายในบริษัท
K-Fair 2022 ไฮไลท์ที่ฮอลล์ 15
Fakuma 2023 -- Arburg จัดแสดงโซลูชันระบบอัตโนมัติของ IML และชุดกล่องเครื่องมือ
การประกอบหุ่นยนต์ IML รุ่นใหม่ของ SWITEK สำหรับการห่อ + ติดฉลากด้านล่างเสร็จเรียบร้อยแล้ว
หุ่นยนต์ IML ใหม่สำหรับหลอดเครื่องสำอางของ SWITEK กำลังได้รับการทดสอบภายในองค์กร
NPE 2024 -- WITTMANN นำเสนอโซลูชั่นเพื่อสาธิต "IT's All WITTMANN
NPE 2024, ChenHsong Machinery นำเสนอโซลูชั่น IML แบบครบวงจร
เครื่องฉีดพลาสติกไฮบริดซีรีส์ Jenius รุ่น K-2022 จาก Zhafir On Show
Fakuma 2023 - - Nestal on Show Elion 1750 เครื่องฉีดขึ้นรูปแบบไฟฟ้าทั้งหมดพร้อมโซลูชัน IML แบบครบวงจร
หุ่นยนต์ IML ใหม่สำหรับคอนเทนเนอร์แบบหลายช่องของ SWITEK กำลังอยู่ระหว่างการทดสอบภายในบริษัท
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right





