
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
คำสำคัญ:หุ่นยนต์ IML; การใช้งานหุ่นยนต์ IML; หุ่นยนต์ติดฉลากในแม่พิมพ์
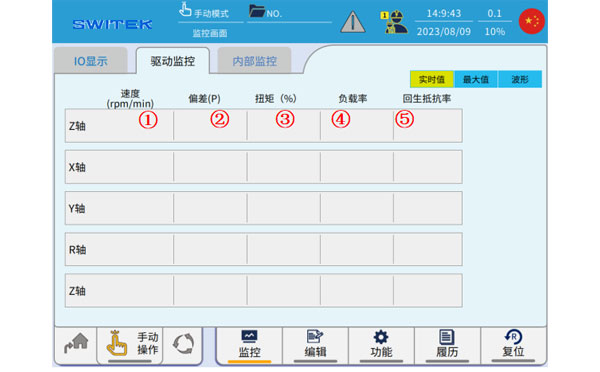
"มอนิเตอร์" ที่เรากำลังพูดถึงอยู่นี้ คือส่วนที่คุณจะเข้าใจสถานะการทำงานของแขนหุ่นยนต์ได้อย่างชัดเจน ในหน้าจอมอนิเตอร์ คุณสามารถตรวจสอบสัญญาณของแขนหุ่นยนต์, EOAT, เครื่องฉีดขึ้นรูป และสถานะการทำงานของเซอร์โวมอเตอร์และ ระบบควบคุมของหุ่นยนต์ IML เพื่อวินิจฉัยจุดที่เสียของระบบได้อย่างรวดเร็ว
คลิกไอคอน  หน้าต่อไปนี้จะปรากฏขึ้น หน้าการตรวจสอบ:
หน้าต่อไปนี้จะปรากฏขึ้น หน้าการตรวจสอบ:

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | หุ่นยนต์/จิ๊ก/อิมเมจ | IO จะแสดงหมวดหมู่ คลิกเพื่อสลับไปยังหน้าสัญญาณที่เกี่ยวข้องได้อย่างรวดเร็ว |
| (2) | หน้าหนังสือ | คลิกเพื่อเปลี่ยนไปยังหน้าอินพุต/เอาต์พุต |
| (3) | จอแสดงผล IO | แสดงสถานะเปิด/ปิดแบบเรียลไทม์ของจุดรับและส่งกระแสไฟฟ้าทั้งหมด |
| (4) | การตรวจสอบการขับขี่ | แสดงผลความเร็ว แรงบิด อัตราโหลด และค่าเบี่ยงเบนของมอเตอร์เซอร์โวแต่ละแกนแบบเรียลไทม์ |
| (5) | การตรวจสอบภายใน | แสดงสถานะอินพุต/เอาต์พุตภายในแบบเรียลไทม์ |
ใช้ (1) หรือ (2) เพื่อสลับการแสดงผล IO และไฟด้านหน้าจะสว่างขึ้นเพื่อแสดงว่าสัญญาณเปิดอยู่
3.5.2 การตรวจสอบการขับขี่
ค่าแบบเรียลไทม์
| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | ความเร็ว (รอบต่อนาที) | แสดงความเร็วในการทำงานของแต่ละแกนแบบเรียลไทม์ |
| (2) | ค่าเบี่ยงเบน (P) | แสดงค่าเบี่ยงเบนในแต่ละแกนแบบเรียลไทม์ |
| (3) | แรงบิด (%) | แสดงค่าแรงบิดแบบเรียลไทม์เป็นเปอร์เซ็นต์สำหรับแต่ละแกน แรงบิดทันทีของมอเตอร์เซอร์โวสามารถสูงถึง 300% ของแรงบิดที่กำหนด |
| (4) | ปัจจัยโหลด | แสดงค่าตัวประกอบภาระการทำงานของแต่ละแกนแบบเรียลไทม์ (สูงสุด 100%) |
| (5) | อัตราความต้านทานความยืดหยุ่น | แสดงอัตราการโหลดของความต้านทานการเกิดใหม่แบบเรียลไทม์ |
สูงสุด

| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | ความเร็วสูงสุดไปข้างหน้า | บันทึกความเร็วสูงสุดของแต่ละแกนขณะเคลื่อนที่ไปในทิศทางบวก |
| (2) | ความเร็วสูงสุดติดลบ | บันทึกความเร็วสูงสุดของแกนแต่ละแกนที่เคลื่อนที่ไปในทิศทางลบ |
| (3) | ค่าเบี่ยงเบนสูงสุดที่เป็นบวก | บันทึกค่าเบี่ยงเบนสูงสุดของแต่ละแกนในทิศทางบวก |
| (4) | ค่าเบี่ยงเบนสูงสุดที่เป็นลบ | บันทึกค่าเบี่ยงเบนสูงสุดของแต่ละแกนในทิศทางลบ |
| (5) | แรงบิดสูงสุดไปข้างหน้า | บันทึกค่าแรงบิดสูงสุดของแต่ละแกนขณะเคลื่อนที่ไปในทิศทางบวก |
| (6) | แรงบิดสูงสุดติดลบ | บันทึกค่าแรงบิดสูงสุดของแต่ละแกนเมื่อเคลื่อนที่ไปในทิศทางลบ |
| (7) | รีเซ็ต | ค่าสูงสุดที่บันทึกไว้ก่อนหน้านี้จะถูกล้างออก |
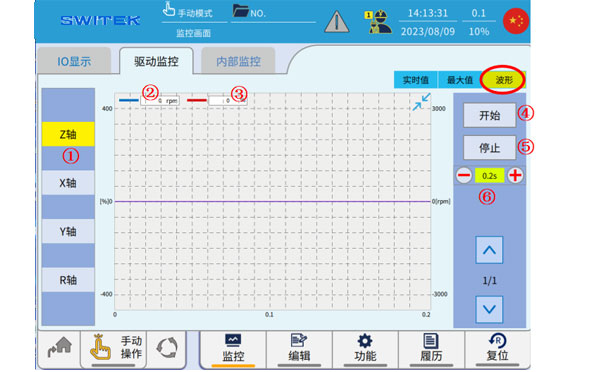
รูปคลื่น
| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือกแกน | คลิกเพื่อเลือกแกนที่จะแสดง |
| (2) | แรงบิด (%) | เส้นโค้งรูปคลื่นสีน้ำเงินแสดงถึงการเปลี่ยนแปลงของแรงบิด แรงบิดทันทีของมอเตอร์เซอร์โวสามารถสูงถึง 300% ของแรงบิดที่กำหนด |
| (3) | ความเร็ว (รอบต่อนาที) | เส้นโค้งรูปคลื่นสีแดงแสดงถึงการเปลี่ยนแปลงของความเร็ว |
| (4) | เริ่ม | หลังจากเลือกแกน (1) แล้ว ให้คลิก "เริ่ม" เพื่อเริ่มการสุ่มตัวอย่างรูปคลื่น |
| (5) | หยุด | หยุดการสุ่มตัวอย่างรูปคลื่น |
| (6) | รูปคลื่นแสดงถึงมาตราส่วน | คลิกปุ่ม "+" และ "-" เพื่อซูมเข้าและซูมออกรูปคลื่นที่แสดง |
3.5.3 จอภาพภายใน
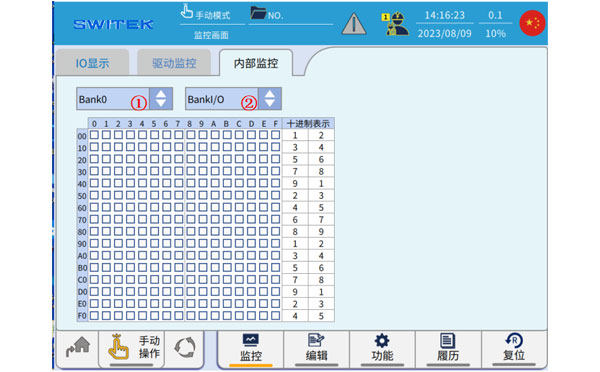
"การตรวจสอบภายใน" หมายถึงการตรวจสอบสถานะเปิด/ปิดของตำแหน่งธงภายในของตัวควบคุม ซึ่งแบ่งออกเป็น 5 หน่วยว่าง *2 รวมทั้งหมด 10 พื้นที่ และการสลับระหว่างธนาคารและหน่วยจะเสร็จสมบูรณ์ผ่าน (1) และ (2)
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
K Fair 2022, KraussMaffei เปิดตัวโซลูชั่นแบบครบวงจรสำหรับกรงพลาสติกด้านโลจิสติกส์
NPE 2024 -- Yushin จัดแสดงหุ่นยนต์ขนาดใหญ่ซีรีส์ MKA
Arburg จัดแสดงระบบ IML ถัง 1Litter 2 ช่องพร้อมชุดมือจับในปี 2012
Fakuma 2023 -- ดูว่า Spetztekhosnastka Ltd. ผู้จัดแสดง Fakuma จากยูเครนจะคาดหวังอะไร
ระบบ IML ใหม่สำหรับถ้วย 6 ช่องพร้อมฉลากโลหะของ SWITEK พร้อมสำหรับการผลิตจำนวนมากแล้ว
SWITEK ใหม่ กล่องสี่เหลี่ยม 2 ช่อง 5 หน้าติดฉลาก IML ระบบ IML ทางเข้าด้านบนที่ติดตั้งสำหรับการผลิต
การประกอบหุ่นยนต์ IML รุ่นใหม่ของ SWITEK สำหรับการห่อ + ติดฉลากด้านล่างเสร็จเรียบร้อยแล้ว
K-Fair 2022 ไฮไลท์ที่ฮอลล์ 15
NPE 2024 -- ชาวเฮติจัดแสดงเครื่องฉีดขึ้นรูปแบบสองแท่นรุ่น Jupiter Series รุ่นที่ 5
หุ่นยนต์ IML ประสิทธิภาพสูงสำหรับเครื่องฉีดขึ้นรูปไฮบริด HAIDA HD360DY
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right





