
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
แขนหุ่นยนต์เซอร์โว 3/5 แกน SWITEK สามารถบันทึกโปรแกรมได้มากกว่า 100 โปรแกรมสำหรับการออกแบบแม่พิมพ์ที่แตกต่างกัน ในบทนี้ เราจะแสดงวิธีการสร้างโปรแกรมใหม่ การสำรองข้อมูลโปรแกรมที่มีอยู่ และการโหลดโปรแกรมใหม่ จากแฟลชไดรฟ์ USB และวิธีที่แขนหุ่นยนต์จะตอบสนองต่อโปรแกรม ฯลฯ
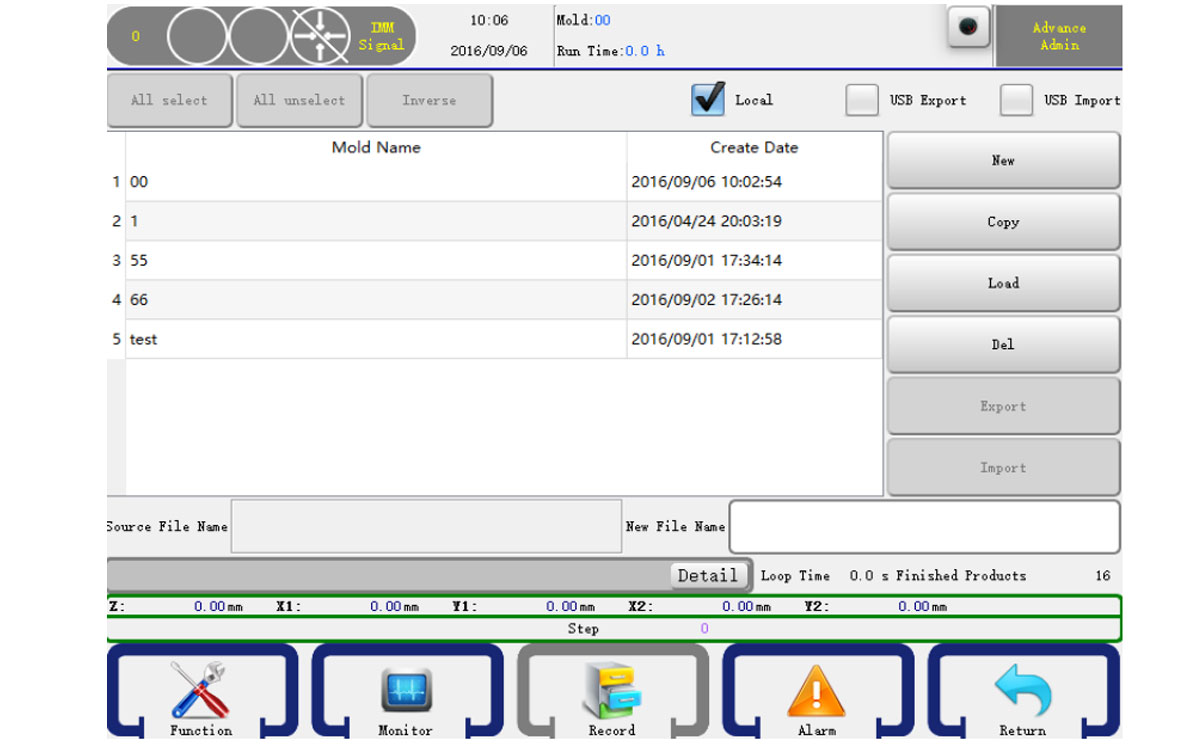
ในสถานะหยุดการทำงาน จากนั้นคลิกปุ่มบันทึกบนแถบเมนูเพื่อเข้าสู่หน้าการจัดการบันทึก คุณสามารถ จัดการโปรแกรมของคุณได้ในหน้านี้ ดังแสดงด้านล่าง:
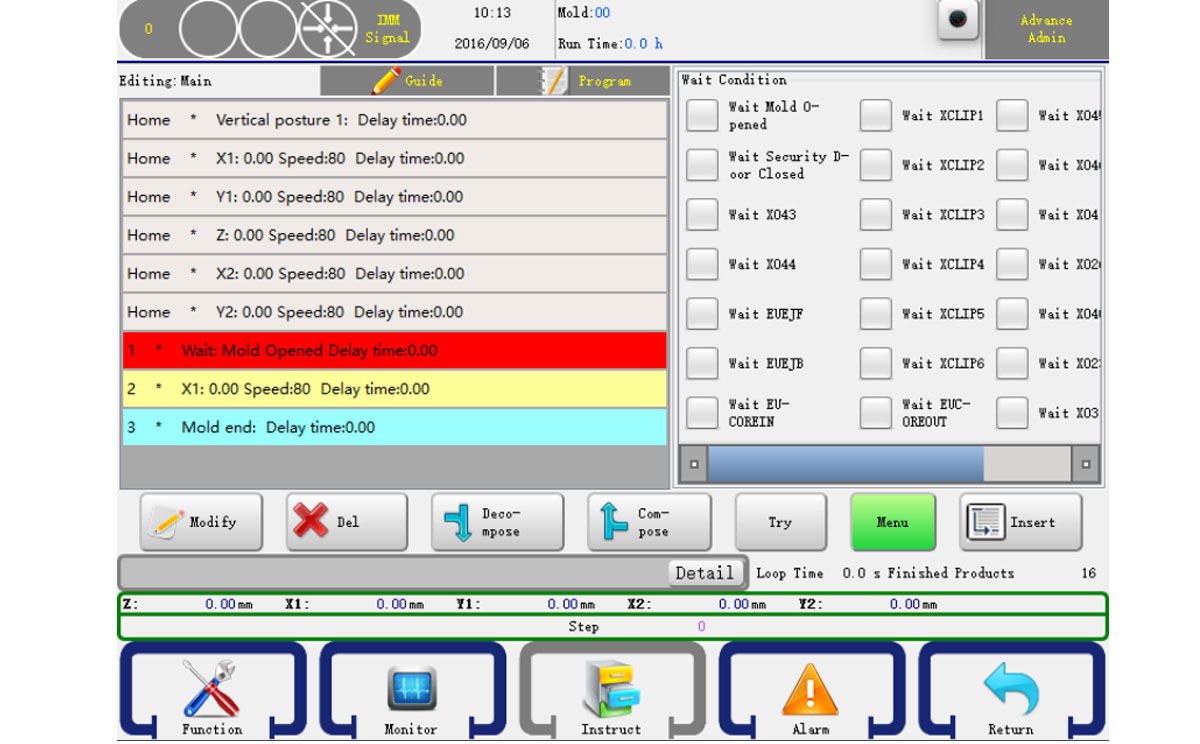
หมุนปุ่มไปทางซ้ายเพื่อเข้าสู่สถานะด้วยตนเอง จากนั้นคลิกปุ่มสอนบนแถบเมนูหลักเพื่อเปิด ตัวแก้ไขโปรแกรม ดังแสดงด้านล่าง:
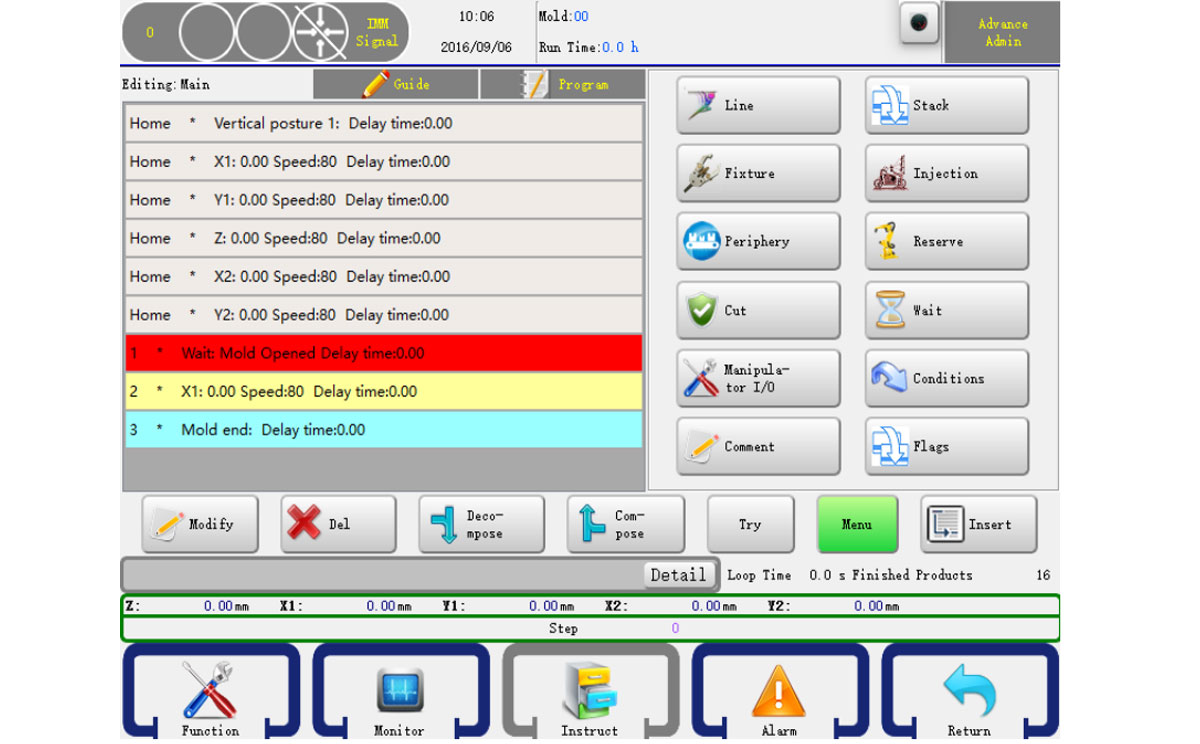
การทำงานของเซอร์โว, การทำงานของสแต็ก, การทำงานของฟิกซ์เจอร์, การฉีด, การทำงานเสริม, การทำงานสำรอง, การทำงานตรวจสอบ, การทำงานรอ, การทำงานแบบอนุกรม, การทำงานรอบข้าง รวมอยู่ในปุ่ม "Instruct" คลิกปุ่มเหล่านี้เพื่อแก้ไขโปรแกรม กด "Instruct" เพื่อกลับไปที่เมนู
ในโหมดคำสั่ง หลังจากเลือกการกระทำที่คุณต้องการรวมเข้าด้วยกันแล้ว ให้คลิก "การรวม" คุณจะได้รับขั้นตอนการกระทำเดียวกัน ซึ่งจะทำงานพร้อมกันเมื่ออยู่ในโหมดการทำงานอัตโนมัติ คุณยังสามารถแยกขั้นตอนที่รวมเข้าด้วยกันเป็นขั้นตอนแบบอนุกรม ได้โดยการกดปุ่ม "Break"
6.2.1 การทำงานของเซอร์โว
คลิกปุ่ม Line เพื่อเข้าสู่โปรแกรมแก้ไขการทำงานของเซอร์โว คุณสามารถตั้งค่าสถานะแกน X1(X2), Y1(Y2), Z, C(Posture) ได้ ดังแสดงด้านล่าง:
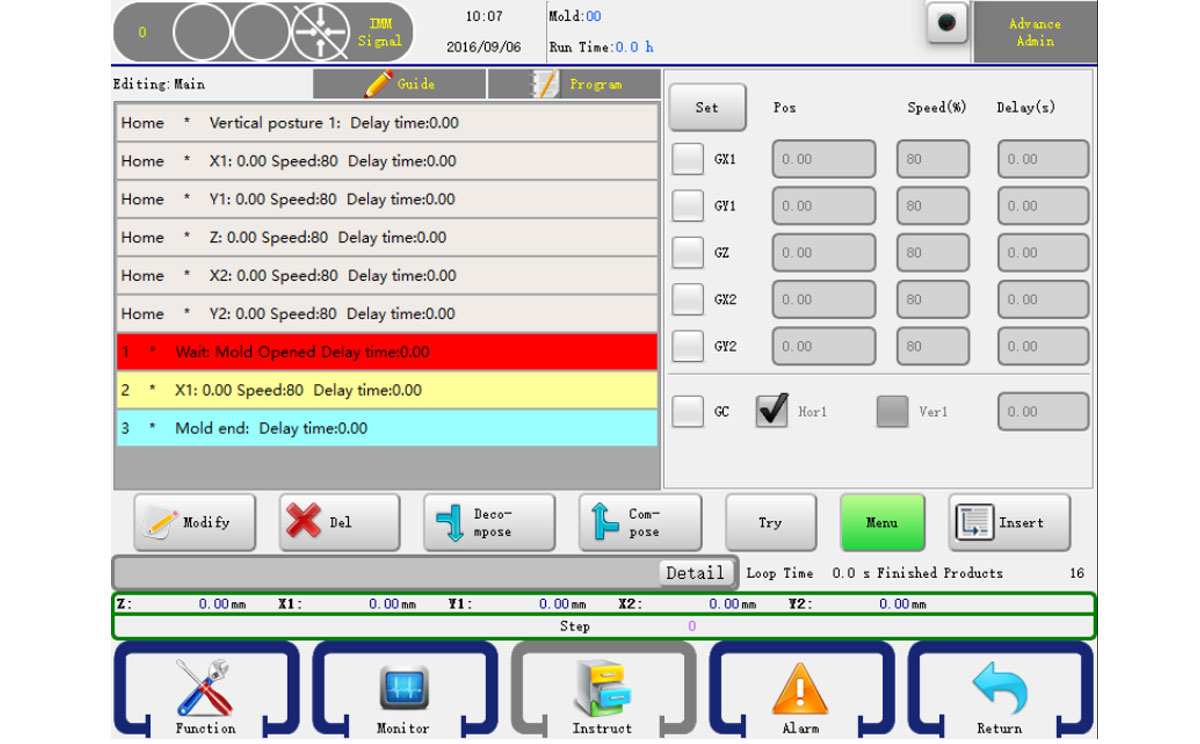
ในหน้านี้ คุณสามารถตั้งค่า X1(X2), Y1(Y2), ตำแหน่งแกน Z, ความเร็วในการทำงาน และเวลาหน่วง หลังจากคลิกไอคอน √ ที่ปรากฏทางด้านซ้าย ให้ตั้งค่าพารามิเตอร์ของแกน เลือกและคลิกปุ่ม "แทรก" เพื่อยืนยัน การตั้งค่าที่เกี่ยวข้องและแทรกลงในขั้นตอนโปรแกรม
มีสองวิธีในการตั้งค่าตำแหน่งแกน:
6.2.2 จุดเริ่มต้นของโปรแกรม
ขั้นตอนทั้งหกแสดงเป็นตำแหน่งและท่าทางเริ่มต้นของแกนทั้งหก
สถานะ [หน้าแรก] ทั้งหกขั้นตอนข้างต้น ซึ่งเป็นสถานะขั้นตอนเริ่มต้นในโปรแกรมใหม่ สามารถแก้ไขได้โดยการคลิก "แก้ไข" เพื่อแก้ไขตำแหน่งที่ระบุ ความเร็วในการทำงาน และเวลาหน่วงของแกน ไม่สามารถลบได้
6.2.3 การดำเนินการสแต็ก
คลิกปุ่ม Stack เพื่อเข้าสู่ตัวแก้ไขการดำเนินการ Stact ดังแสดงด้านล่าง:
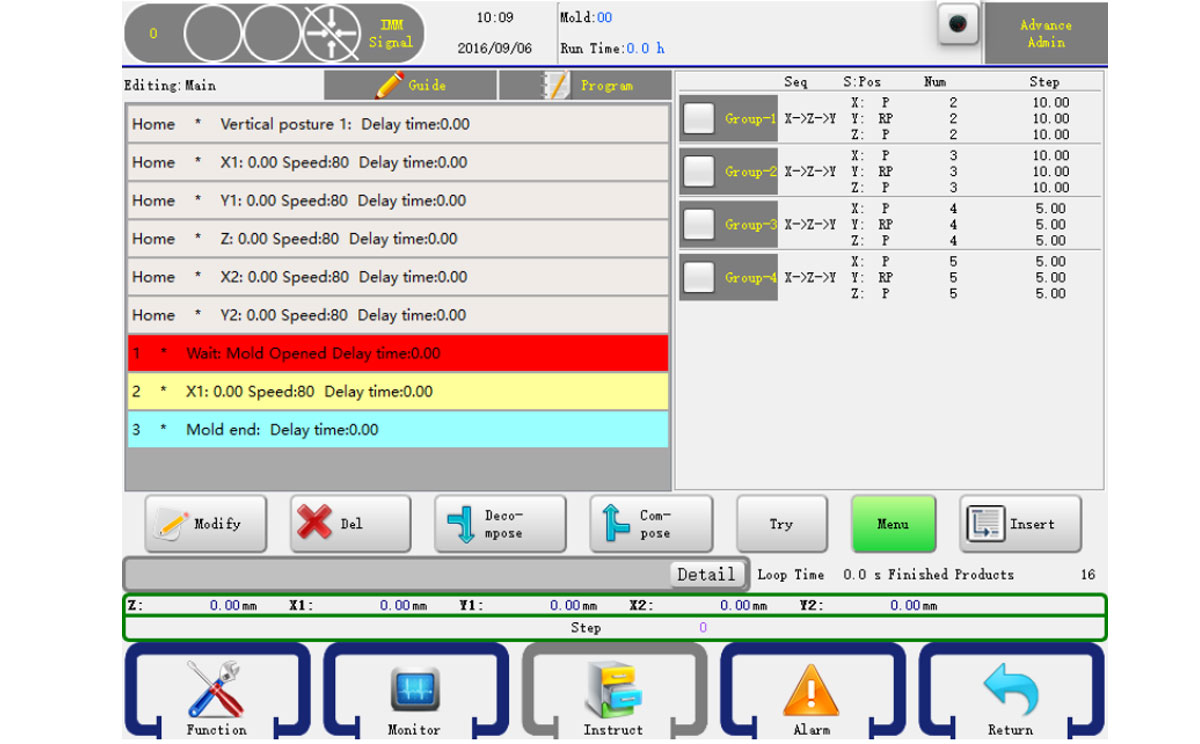
เลือกด้านซ้ายของสแต็กเพื่อแทรกกลุ่มโปรแกรม ตั้งค่ากลุ่ม จากนั้นคลิกปุ่มแทรกที่อยู่ด้านหน้าของขั้นตอนการซ้อน หุ่นยนต์จะซ้อนผลิตภัณฑ์ตามลำดับเมื่อทำงานอัตโนมัติ
หากคุณต้องการใช้แกน Y เพื่อซ้อน คุณควรตรวจสอบให้แน่ใจว่าได้แทรกซ้อนเข้าไปก่อนที่แกน Y จะทำการลดระดับลง
6.2.4 การดำเนินการติดตั้ง
คลิกปุ่ม Fixture เพื่อเข้าสู่ตัวแก้ไขการทำงานของ Fixture และ Sucker ดังแสดงด้านล่าง:
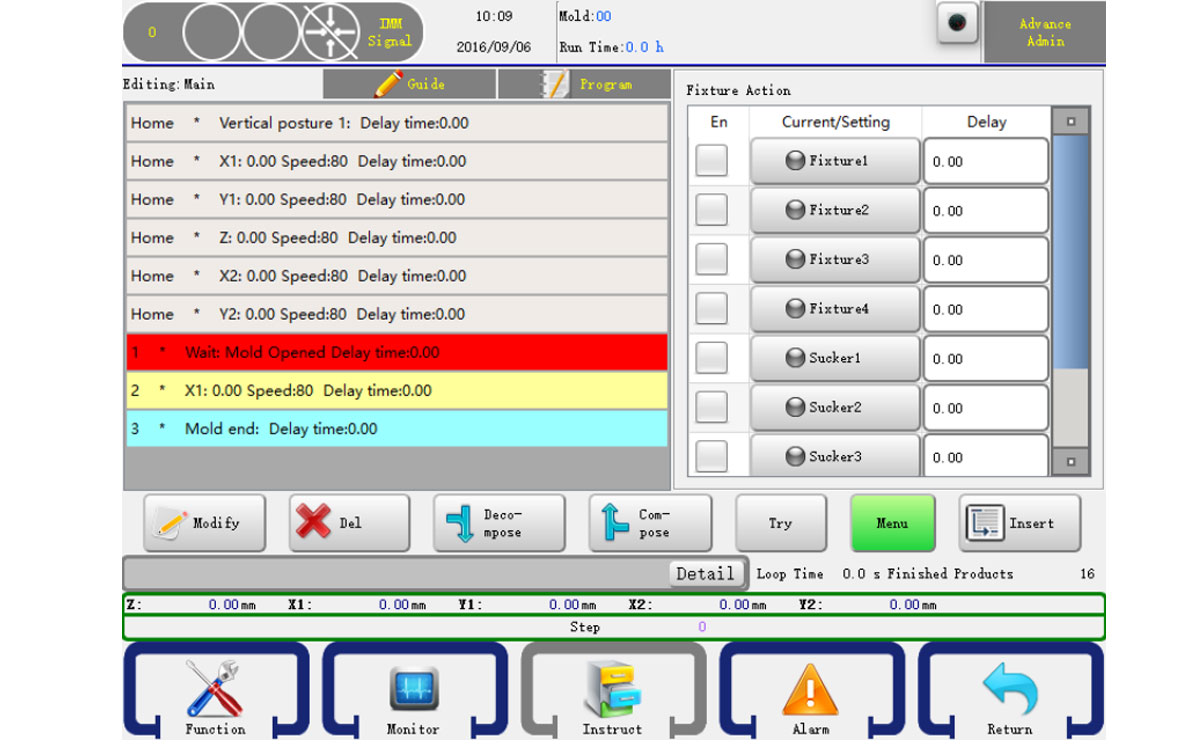
ตัวควบคุมสามารถตั้งค่าอุปกรณ์ติดตั้งได้ 4 ชิ้นและตัวดูด 2 ตัว โดยการคลิกปุ่มที่ต้องการควบคุม และไฟแสดงสถานะจะเปลี่ยนเป็นสีแดงเมื่อส่งออก จากนั้นคลิกที่ด้านซ้ายเพื่อให้กลายเป็น √ จากนั้นคลิก "แทรก" ขั้นตอนการดำเนินการจะถูกแทรก ลงในขั้นตอนแรกของกระบวนการเลือก
หลังจากแทรกฟิกซ์เจอร์และตัวดูดแล้ว โปรดตรวจสอบให้แน่ใจว่าได้แทรกการดำเนินการตรวจสอบ มิฉะนั้นโปรแกรมจะไม่ทดสอบสัญญาณยืนยัน หากคุณไม่ยอมรับสัญญาณ คุณจะไม่จำเป็นต้องใช้การดำเนินการตรวจสอบ แต่อย่างไรก็ตาม คุณควรมีการดำเนินการตรวจสอบเพื่อป้องกันเครื่องจักร
6.2.5 การดำเนินการ IMM
คลิกปุ่มฉีดเพื่อเข้าสู่ตัวแก้ไขการดำเนินการฉีด ดังแสดงด้านล่าง:
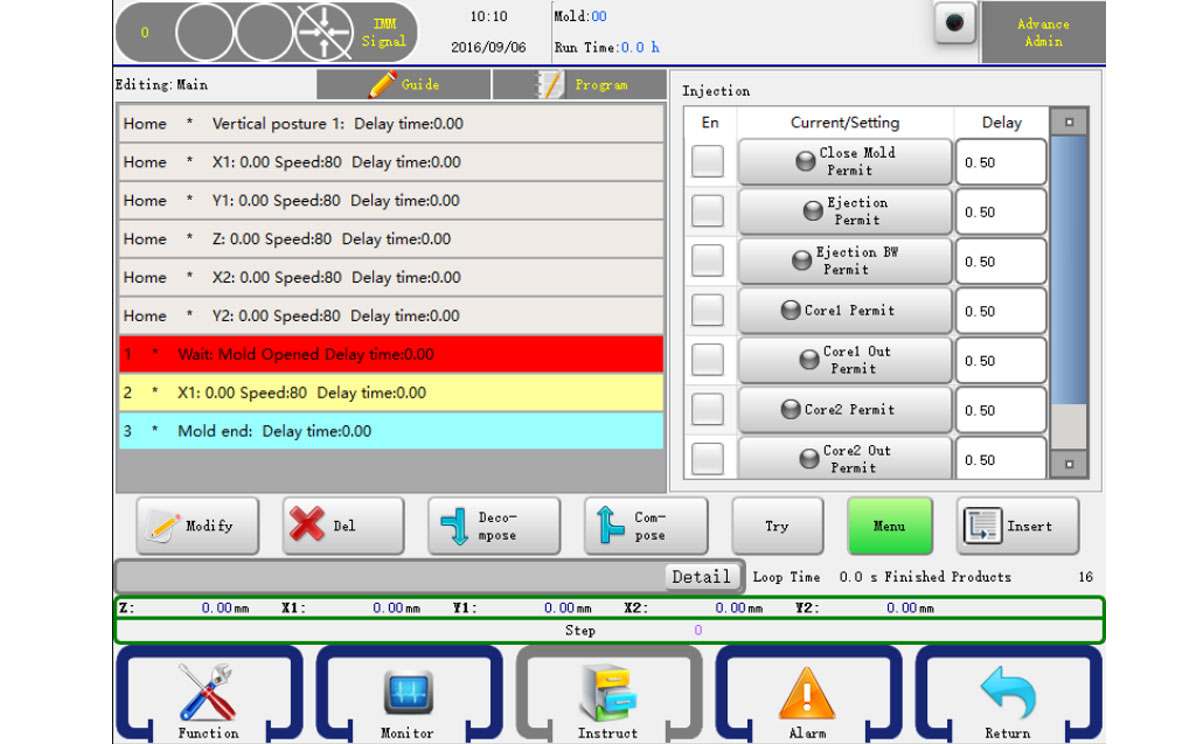
การดำเนินการจะเหมือนกับการดำเนินการติดตั้งโปรแกรม ดู 6.2.4
6.2.6 การดำเนินการเสริม
คลิกปุ่มเสริมเพื่อเข้าสู่ตัวแก้ไขการดำเนินการรอบนอก คุณจะพบการดำเนินการฉีด สายพานลำเลียง จุดสำรอง และสแต็กในตัวแก้ไขนี้ ดังแสดงด้านล่าง:
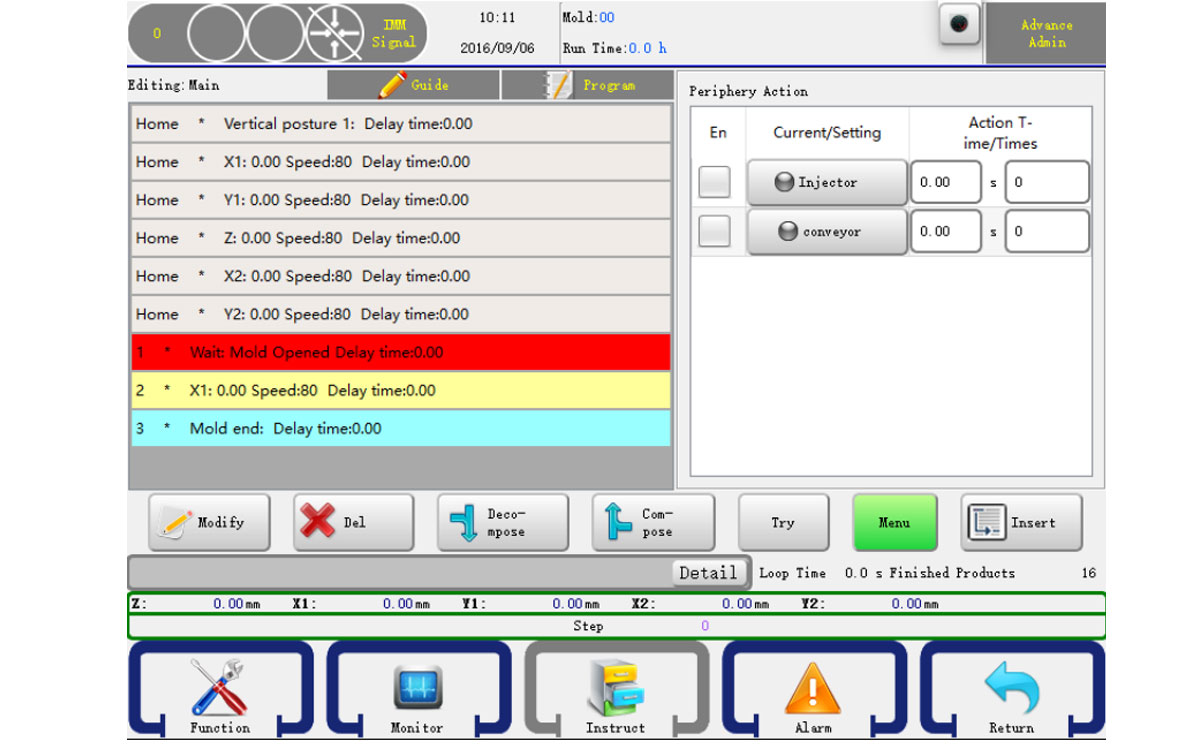
การดำเนินการจะเหมือนกับการดำเนินการติดตั้งโปรแกรม ดู 6.2.4
เวลา: หมายถึงระยะเวลาในการดำเนินการในแต่ละรอบ
การหน่วงเวลา: ตั้งค่าจำนวนแม่พิมพ์ในโหมดอัตโนมัติเมื่อเอาต์พุต อาจตั้งค่าทุกๆ เว้น 1 หรือ 2 ครั้ง เป็นต้น
6.2.7 การดำเนินการสำรอง
คลิกปุ่ม "สำรอง" เพื่อเข้าสู่ตัวแก้ไขการดำเนินการ ดังแสดงด้านล่าง:
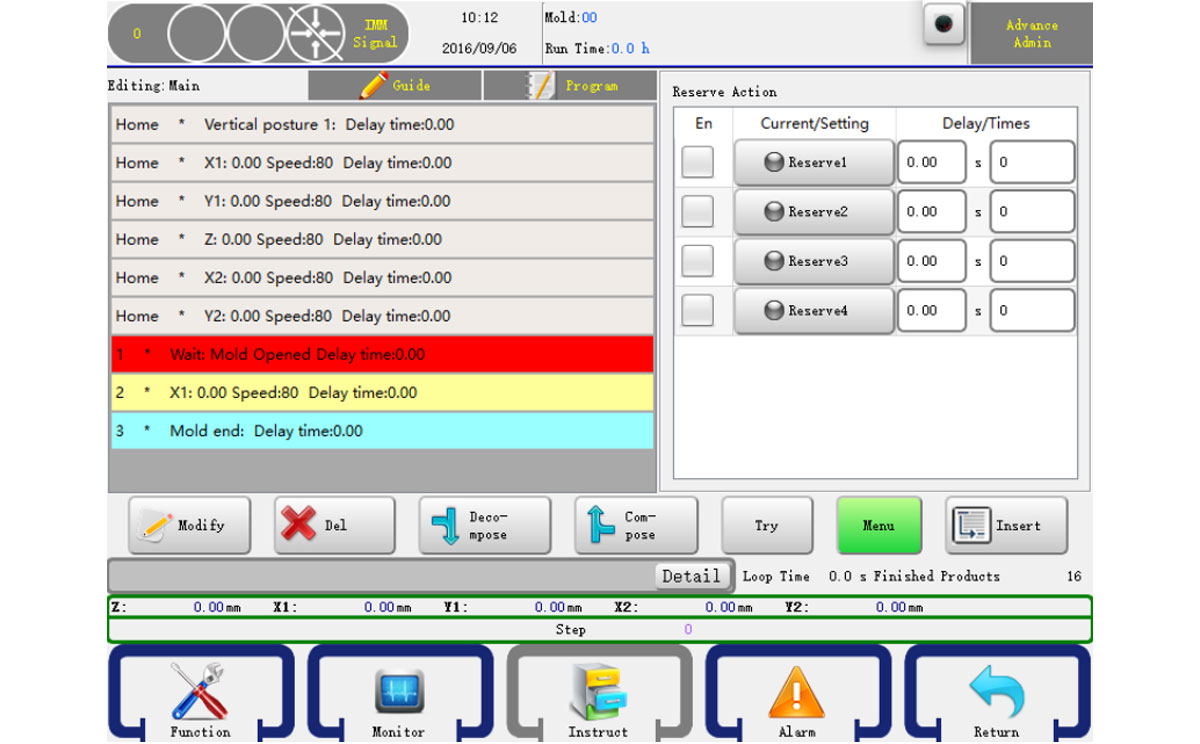
ระบบมีตัวสำรองสี่ตัว
เวลา: หมายถึงระยะเวลาในการดำเนินการในแต่ละรอบ
การหน่วงเวลา: ตั้งค่าจำนวนแม่พิมพ์เป็นอัตโนมัติเมื่อส่งออก อาจตั้งค่าทุกๆ เว้น 1 หรือ 2 แม่พิมพ์ เป็นต้น
6.2.8 การดำเนินการรอ
คลิกปุ่มรอเพื่อเข้าสู่ตัวแก้ไขการดำเนินการรอ การดำเนินการประเภทนี้หมายความว่าโปรแกรมจะหยุดก่อนที่สัญญาณอินพุตที่คุณต้องการรอจะเริ่มทำงาน ตัวแก้ไขมีดังต่อไปนี้:
เพียงตรวจสอบสัญญาณที่คุณต้องการรอและคลิกปุ่มแทรกเพื่อยืนยันการเปลี่ยนแปลงของคุณ
6.2.9 ความคิดเห็น
คลิกปุ่ม "แสดงความคิดเห็น" เพื่อเข้าสู่โปรแกรมแก้ไขความคิดเห็น ซึ่งคุณสามารถแสดงความคิดเห็นในโปรแกรมได้

คุณสามารถใช้คีย์บอร์ด virture เพื่อป้อนข้อมูลได้

6.2.10 เงื่อนไข
คุณสามารถตั้งเงื่อนไขในโปรแกรมของคุณได้:
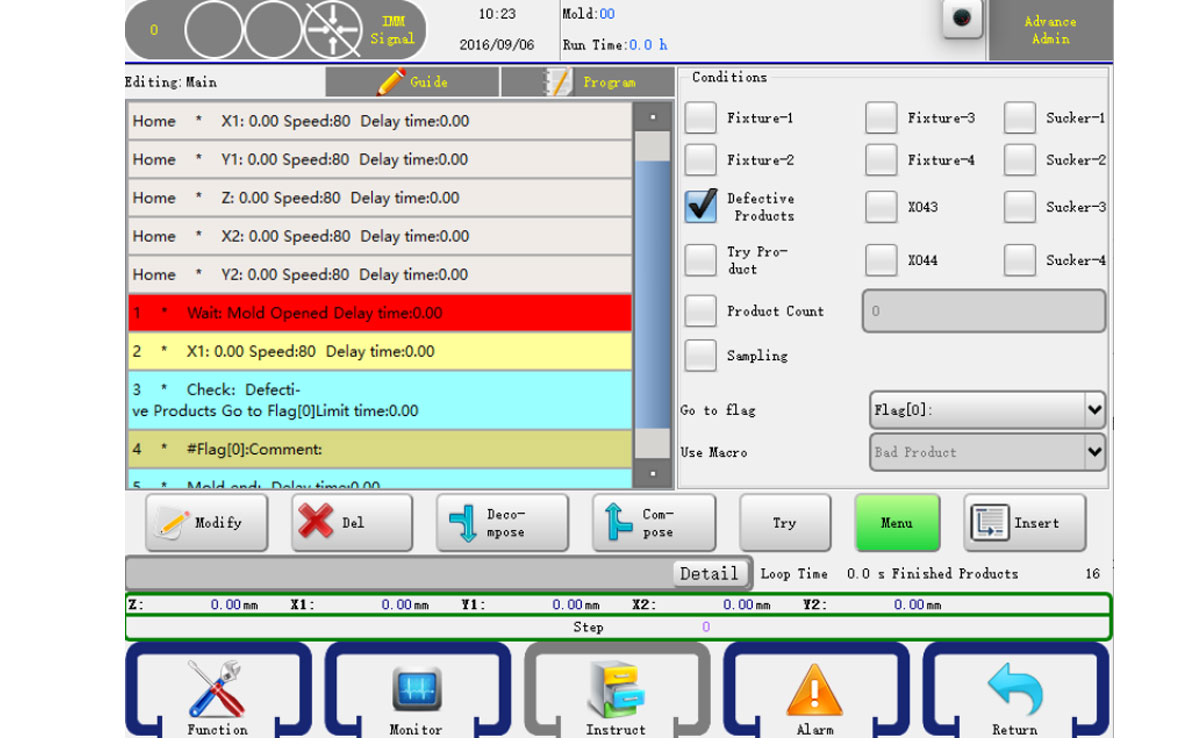
ข้อควรระวัง: โปรแกรมจะต้องมีคำอธิบายเพื่อใช้เงื่อนไข
6.2.11 ปรับเปลี่ยนโปรแกรม
เลือกขั้นตอนที่คุณต้องการแก้ไข จากนั้นคลิกปุ่มแก้ไข กล่องโต้ตอบแก้ไขจะเปิดขึ้น ดังแสดงด้านล่าง:
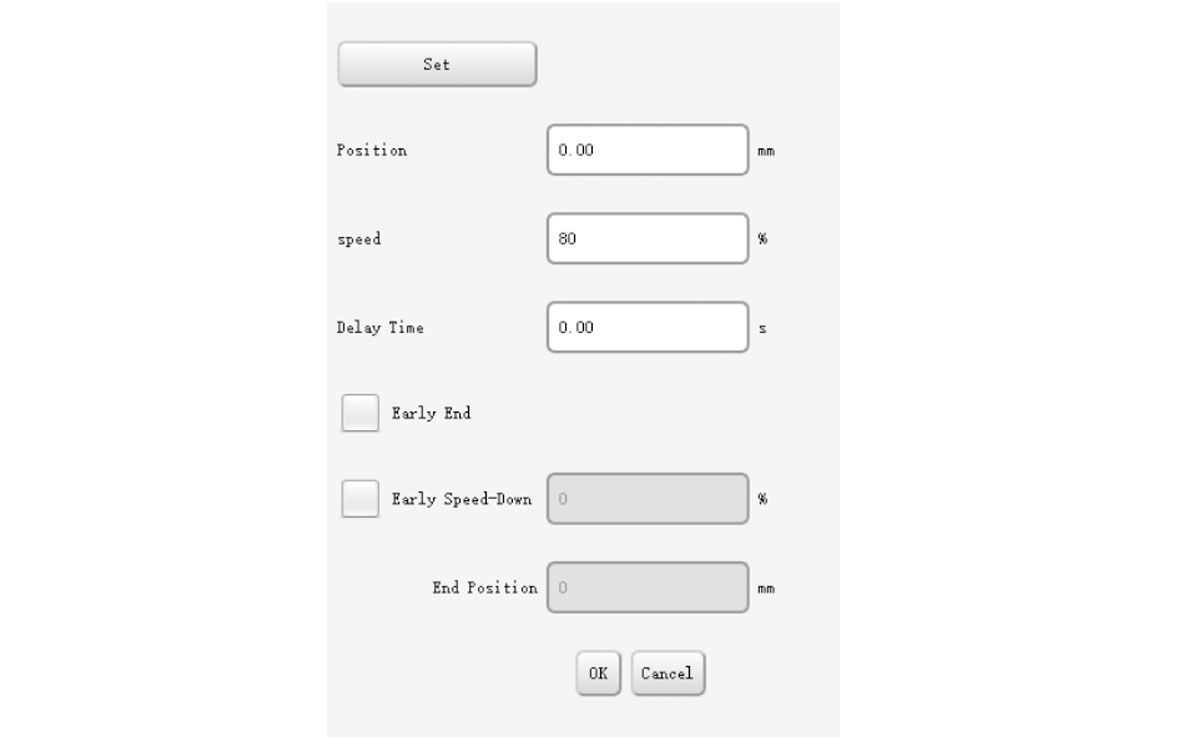
คุณสามารถปรับเปลี่ยนการกำหนดค่าการดำเนินการและกดตกลงเพื่อยืนยัน
ขั้นตอนต่อไปนี้จะช่วยให้คุณเรียนรู้และฝึกฝนการเขียนโปรแกรมหุ่นยนต์ ในการเขียนโปรแกรมหุ่นยนต์แม่พิมพ์จริง ขึ้นอยู่กับสถานการณ์จริงของคุณและตั้งค่าตำแหน่งแกนเซอร์โว และตั้งค่าลำดับที่ถูกต้องด้วย เครื่องฉีดพลาสติก
6.3.1 คำสั่ง
ขั้นตอนที่ใช้ในการหยิบผลิตภัณฑ์และป้อนอาหารส่วนหาง หุ่นยนต์จะอยู่ที่ด้านบนของเครื่องฉีดพลาสติก และรอสัญญาณเปิดแม่พิมพ์ เมื่อแม่พิมพ์ของเครื่องฉีดพลาสติกเปิดออก แขนหุ่นยนต์จะเลื่อนลงและหยิบผลิตภัณฑ์และ ตัววิ่ง จากนั้นปล่อยตัววิ่งไปยังเครื่องบด จากนั้นนำผลิตภัณฑ์ไปยังสายพานลำเลียง ซึ่งจะเคลื่อนที่ไปในแต่ละรอบของแม่พิมพ์
6.3.2 การดำเนินการ
> เข้าสู่โหมดอัตโนมัติ
> แขนหมุนไปยังจุดเริ่มต้น รอสัญญาณเปิดแม่พิมพ์
> ดูด 1 สำหรับผลิตภัณฑ์ ฟิกซ์เจอร์ 1 สำหรับรันเนอร์
> แขนหมุนออกนอกเครื่องฉีดพลาสติก และส่งสัญญาณปิดแม่พิมพ์
> ปล่อยรันเนอร์
> วางผลิตภัณฑ์ลงบนสายพานลำเลียง และเริ่มเคลื่อนที่เป็นเวลา 3 วินาที
> แขนหมุนกลับสู่ตำแหน่งรอ
6.3.3 โปรแกรม
Home X1: 0.0 Speed: 30 Delay time: 0.00
Home Y1: 0.0 Speed: 30 Delay time: 0.00
Home Z: 0.0 Speed: 30 Delay time: 0.00
Home X2: 0.0 Speed: 30 Delay time: 0.00
Home Y2: 0.0 Speed: 30 Delay time: 0.00
Home Vertical Posture Delay time: 0.00
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
ระบบโหลดกล่องแก้วรุ่นใหม่ของ SWITEK พร้อมสำหรับการจัดส่งแล้ว
Fakuma 2023 -- ENGEL จัดแสดงเครื่องฉีดขึ้นรูปแบบไฟฟ้าทั้งหมดพร้อมโซลูชัน IML แบบครบวงจร
Fakuma 2023 -- Arburg จัดแสดงโซลูชันระบบอัตโนมัติของ IML และชุดกล่องเครื่องมือ
การประกอบหุ่นยนต์ IML รุ่นใหม่ของ SWITEK สำหรับการห่อ + ติดฉลากด้านล่างเสร็จเรียบร้อยแล้ว
วิศวกร SWITEK เสร็จสิ้นการติดตั้งแมกกาซีนใหม่ในประเทศชิลี
SWITEK กำลังทดสอบระบบ IML ทางเข้าด้านบนสำหรับถังสีขนาด 20 ลิตรภายในบริษัท
Fakuma 2023 -- ดูว่า Spetztekhosnastka Ltd. ผู้จัดแสดง Fakuma จากยูเครนจะคาดหวังอะไร
หุ่นยนต์ IML ประสิทธิภาพสูงสำหรับเครื่องฉีดขึ้นรูปไฮบริด HAIDA HD360DY
K-Fair 2022 NESSI & NEGRIBOSSI จัดแสดงนิทรรศการร่วมกัน
K-2022 โซลูชั่น IML แบบครบวงจรของ Yizumi On Show พร้อมเครื่องฉีดพลาสติกไฟฟ้าความเร็วสูง PAC250E
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right











