
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
การตั้งโปรแกรมแขนหุ่นยนต์สำหรับเครื่องฉีดพลาสติกไม่ได้เป็นเพียงการตั้งค่าตำแหน่งแกน การเปิด/ปิดการทำงานของกระบอกสูบและชิ้นส่วน EOAT อื่นๆ เท่านั้น แต่ยังรวมถึงการตั้งค่าสัญญาณเพื่อให้หุ่นยนต์สื่อสารกับเครื่องฉีดพลาสติก การตั้งค่าผลิตภัณฑ์ การตั้งค่าสแต็ก การกำหนดค่าเครื่องจักร การตั้งค่าระบบ การตั้งค่าจุดความปลอดภัย ฯลฯ ในบทนี้ เราจะอธิบายวิธีการกำหนดค่าพารามิเตอร์เหล่านี้ของแขนหุ่นยนต์ทีละขั้นตอน
ในสถานะหยุดการทำงาน ให้คลิกรายการเมนูฟังก์ชันบนแถบเมนูหลักเพื่อเข้าสู่หน้ากำหนดค่าฟังก์ชัน ดังแสดงด้านล่าง:
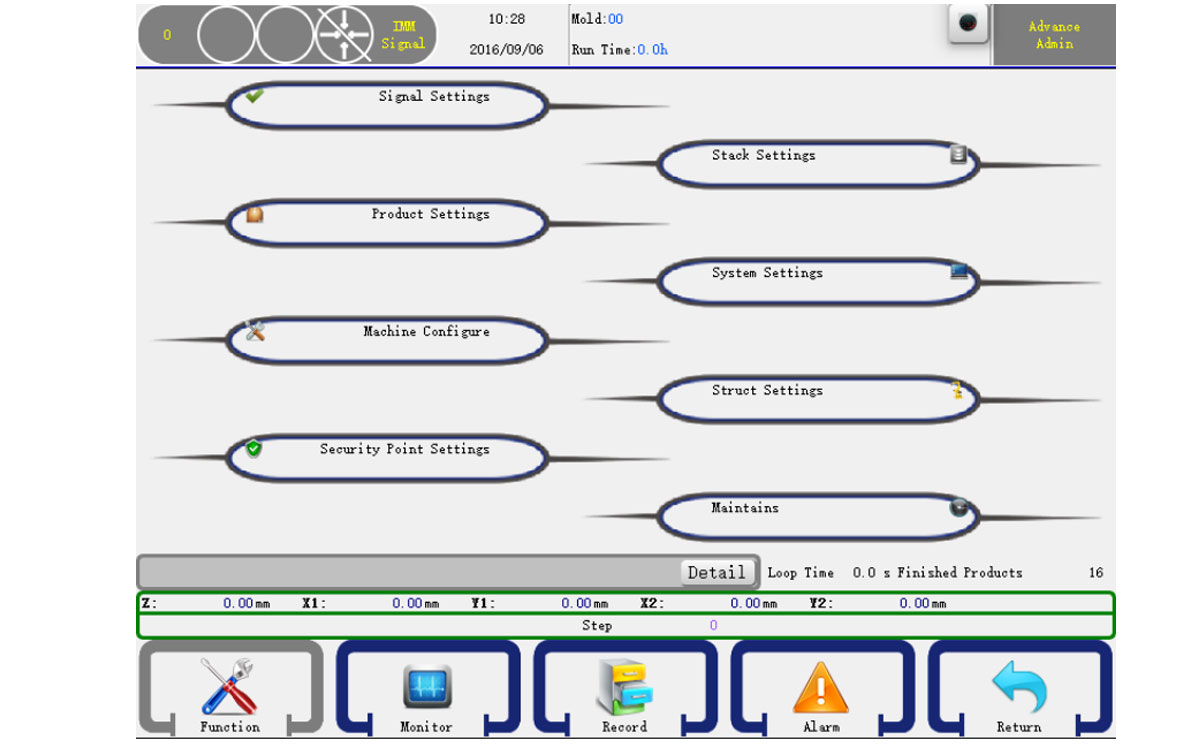
คลิกรายการการตั้งค่าสัญญาณเพื่อไปที่หน้าการตั้งค่าสัญญาณ ดังแสดงด้านล่าง:

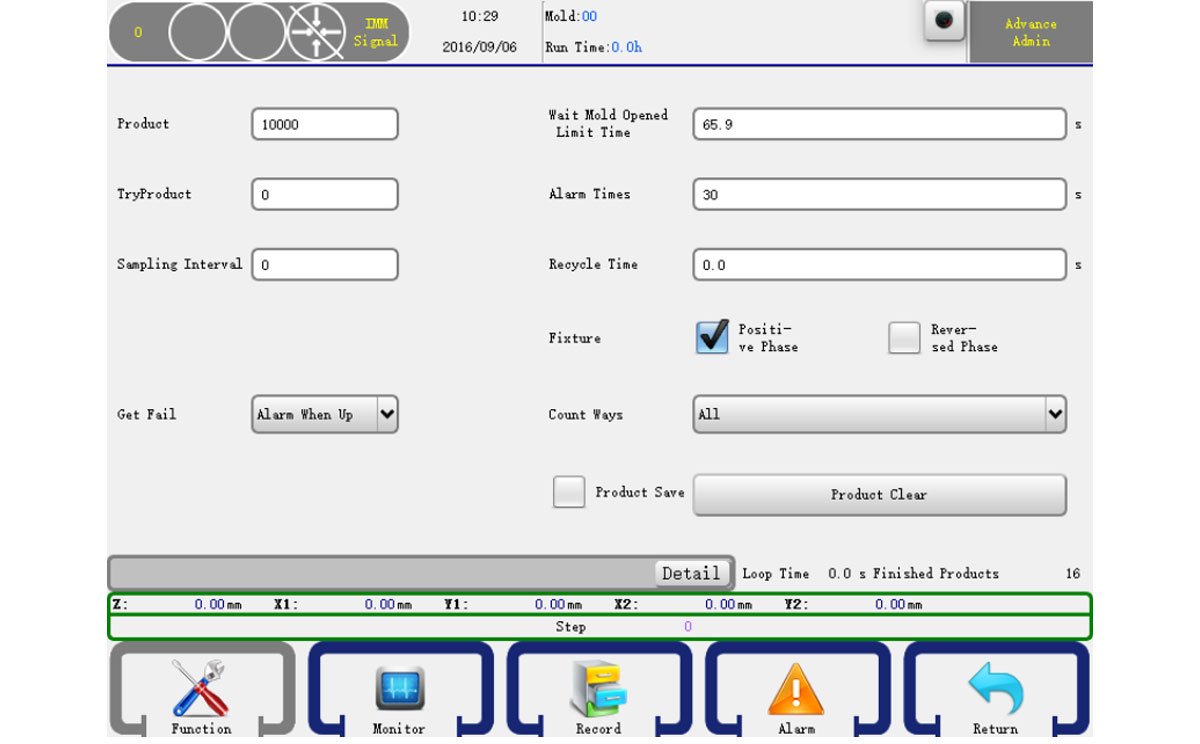
คลิกปุ่ม การตั้งค่าผลิตภัณฑ์ เพื่อไปที่หน้าการตั้งค่าผลิตภัณฑ์ ดังแสดงด้านล่าง:
คลิกปุ่ม กำหนดค่าเครื่อง เพื่อไปที่หน้ากำหนดค่าเครื่อง ดังแสดงด้านล่าง:
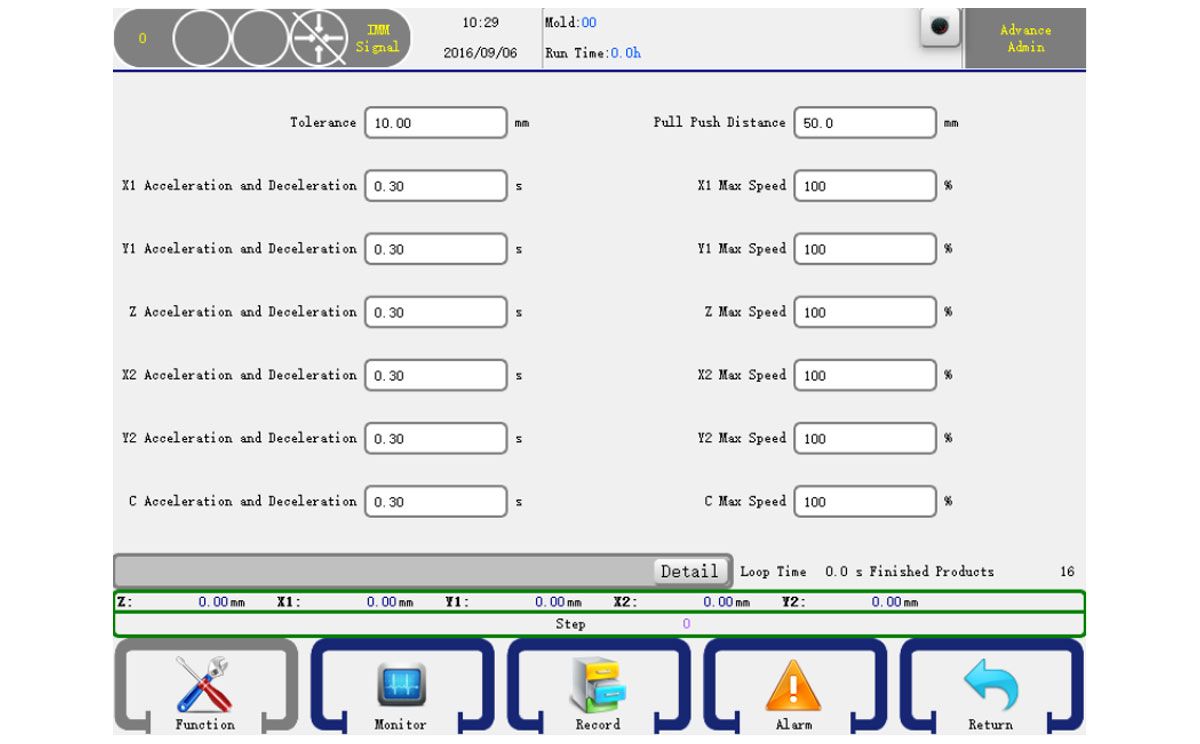
ความคลาดเคลื่อน: ความคลาดเคลื่อนระหว่างพัลส์ที่ส่งและพัลส์ป้อนกลับของเซอร์โว
โซนความปลอดภัย: โซนความปลอดภัยระหว่างแขนและแขนย่อย
การเร่งและลดความเร็วในแกน X, Y, Z: เวลาการเร่งและลดความเร็วของแกนเซอร์โว
ความเร็วสูงสุดในแกน X, Y, Z: ความเร็วสูงสุดของแกนเซอร์โว
คลิกปุ่ม การตั้งค่าจุดรักษาความปลอดภัย เพื่อไปที่หน้าการตั้งค่าจุดรักษาความปลอดภัย ดังแสดงด้านล่าง:
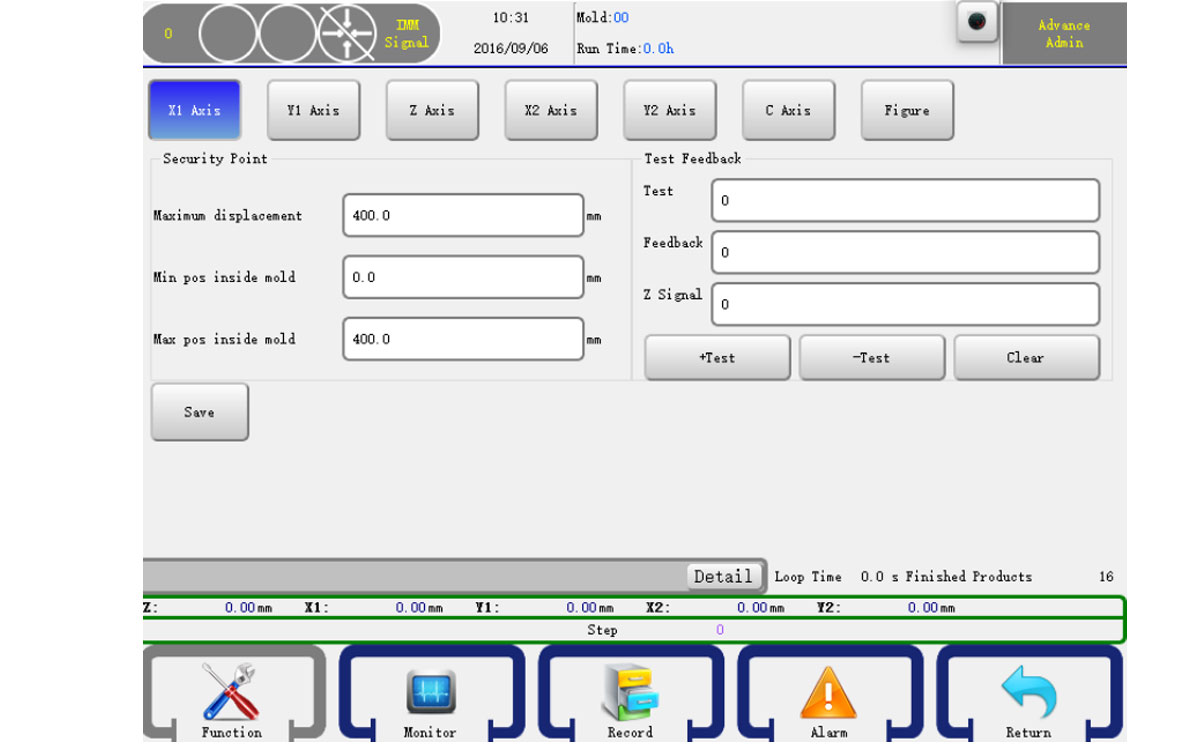
หมายเหตุ: คุณสามารถแก้ไขตำแหน่งต่ำสุดและสูงสุดของ X ได้ในช่องพารามิเตอร์แกน X ของหน้าพารามิเตอร์เชิงกล
คลิกรายการการตั้งค่าสแต็กเพื่อไปที่หน้าการตั้งค่าสแต็ก ดังแสดงด้านล่าง:
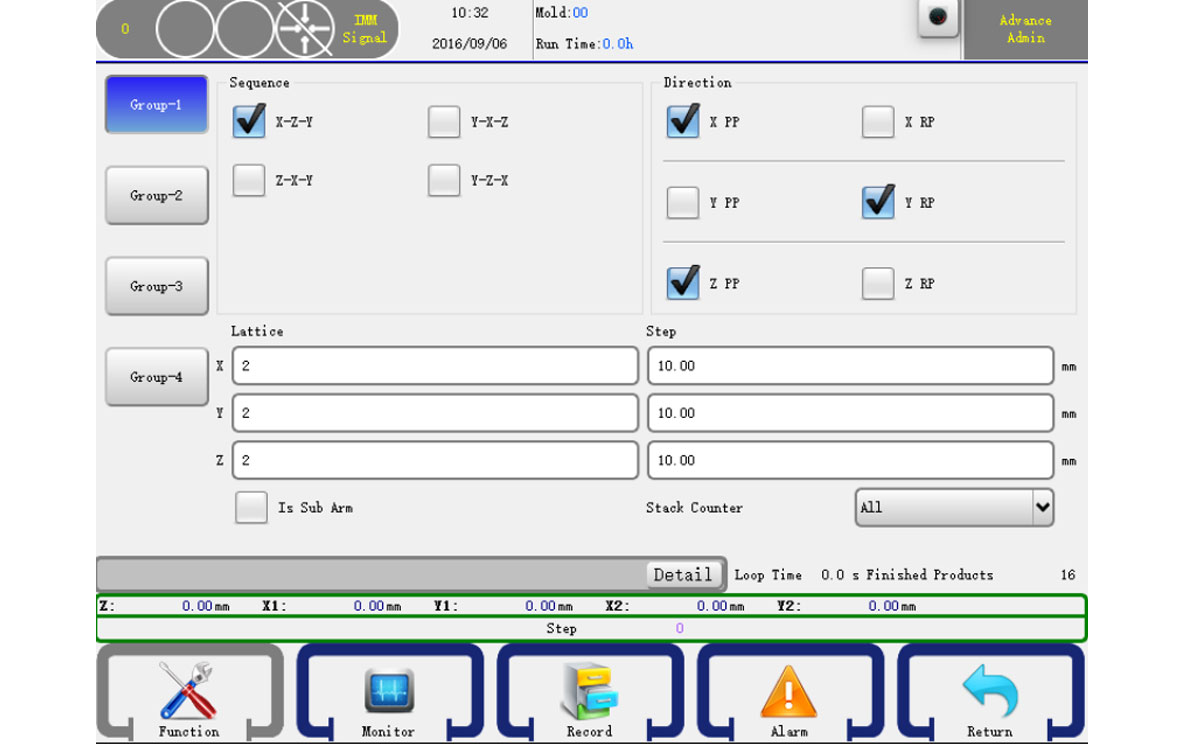
ระบบของเรามีการตั้งค่ากลุ่มสแต็กสี่กลุ่ม
ลำดับ: เลือกลำดับสแต็ก
X RP: หากเลือก หุ่นยนต์จะเรียงซ้อนแบบย้อนกลับบนแกน X
Y RP: หากเลือก หุ่นยนต์จะเรียงซ้อนแบบย้อนกลับบนแกน Y
Z RP: หากเลือก หุ่นยนต์จะเรียงซ้อนแบบย้อนกลับบนแกน Z
7.6.1 การตั้งค่า
คลิกรายการการตั้งค่าระบบเพื่อไปที่หน้าการตั้งค่าระบบ ดังแสดงด้านล่าง:
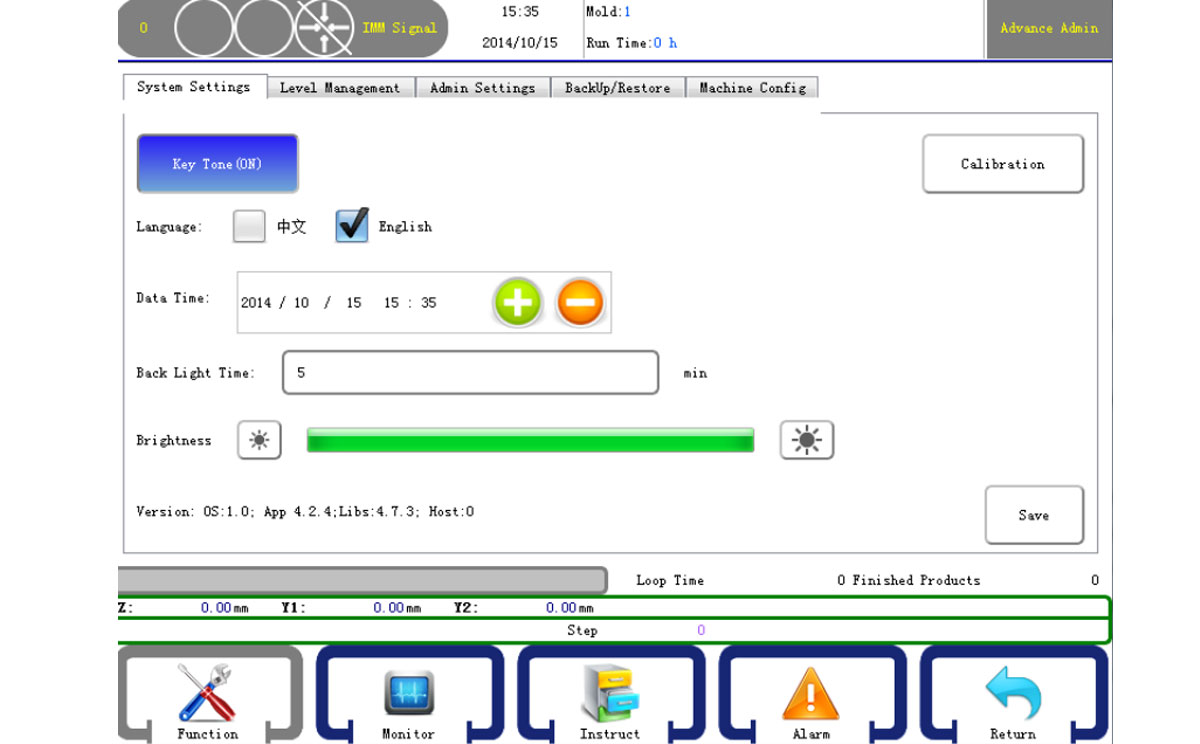
เสียงแป้นพิมพ์: เมื่อกดแป้นพิมพ์จะส่งเสียงบี๊บหากเปิดอยู่
ภาษา: เลือกภาษาอินเทอร์เฟซ
เวลาวันที่: ตั้งค่าวันที่ปัจจุบัน
เวลาไฟแบ็คไลท์: หากไม่มีการดำเนินการใดๆ ในช่วงเวลาที่กำหนด ไฟแบ็คไลท์จะดับลง
เวอร์ชัน: เวอร์ชันของระบบ
คลิกบันทึกเพื่อยืนยันหลังจากการตั้งค่าระบบเสร็จสิ้น
7.6.2 การจัดการระดับ
คลิกรายการการจัดการระดับ เพื่อไปที่หน้าการตั้งค่าระบบ ดังแสดงด้านล่าง:
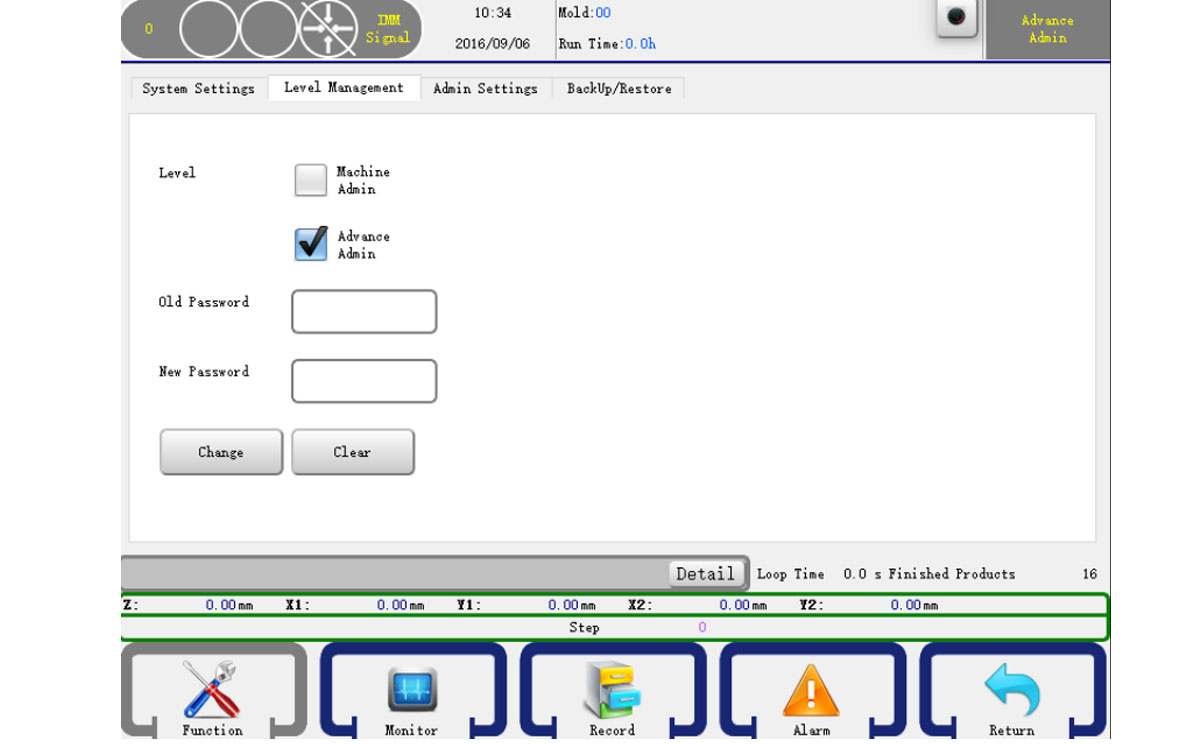
การจัดการระดับสามารถเปลี่ยนแปลงข้อมูลพื้นฐานได้ ในขณะที่ผู้ดูแลระบบสามารถแก้ไขพารามิเตอร์ใดๆ ก็ได้ ป้อนรหัสผ่านเดิม จากนั้นป้อนรหัสผ่านใหม่และยืนยัน คุณสามารถเปลี่ยนรหัสผ่านได้
7.6.3 การสำรองข้อมูล/กู้คืน
คลิกรายการสำรองข้อมูล/คืนค่า เพื่อเข้าสู่หน้าการตั้งค่าระบบ ดังแสดงด้านล่าง:
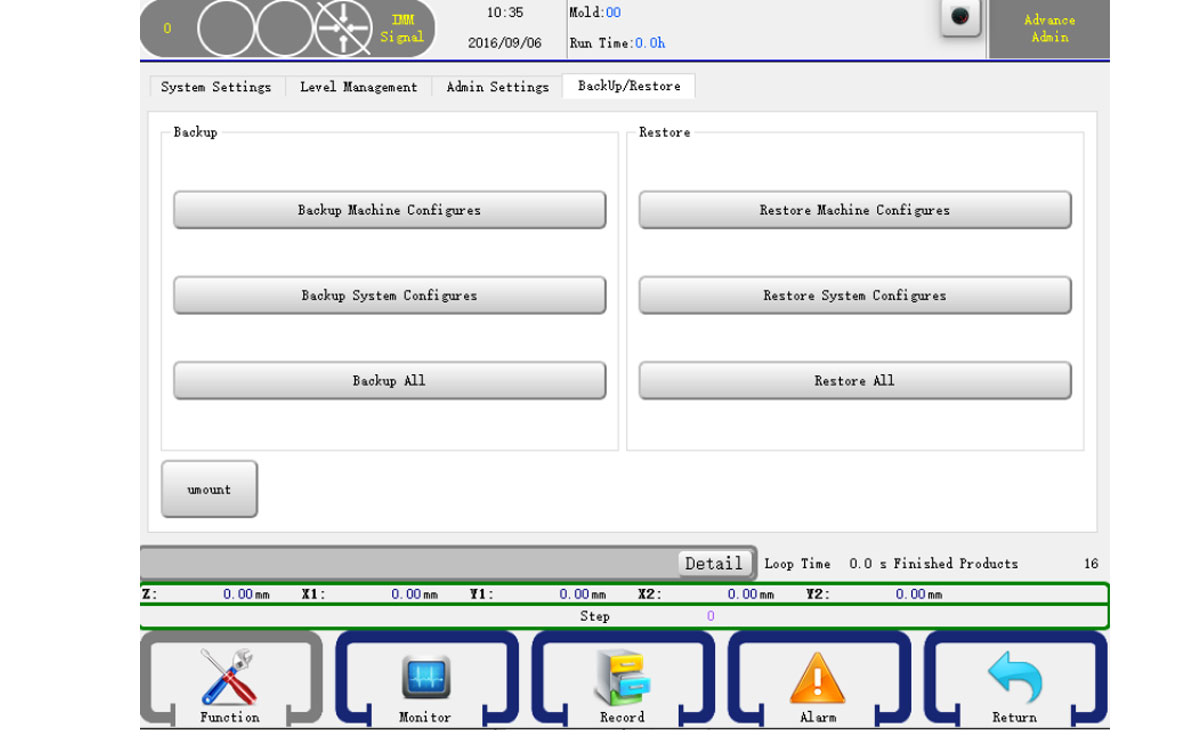
คุณสามารถใช้ USB เพื่อสำรองข้อมูลหรือกู้คืน "พารามิเตอร์เครื่องจักร" "พารามิเตอร์ระบบ" และ "พารามิเตอร์แม่พิมพ์" หรือเลือกทั้งหมดเพื่อสำรองข้อมูล/กู้คืน
คลิกรายการ การตั้งค่าโครงสร้าง เพื่อไปที่หน้าการตั้งค่าโครงสร้าง ดังแสดงด้านล่าง:
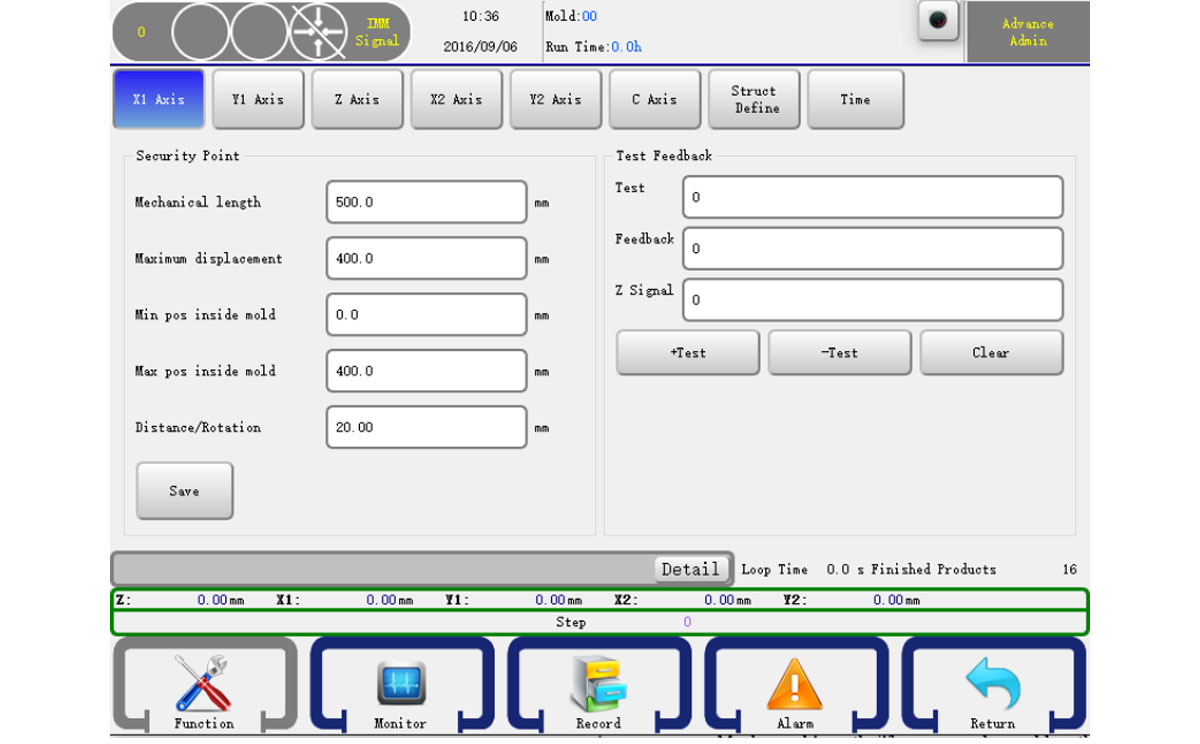
ความยาวเชิงกล: ความยาวเชิงกลของแกน
ระยะทาง/การหมุน: ระยะทางหนึ่งรอบของเซอร์โว
คุณสามารถตั้งค่าพารามิเตอร์อื่นๆ เป็น 5.4 ได้ โปรดกดปุ่มบันทึกเพื่อยืนยันการเปลี่ยนแปลง คำเตือน: การกำหนดโครงสร้างอาจทำให้เครื่องจักรเสียหายและบาดเจ็บได้! โปรดติดต่อผู้ผลิต
คลิกรายการบำรุงรักษาเพื่อเข้าสู่หน้าบำรุงรักษา ดังแสดงด้านล่าง:
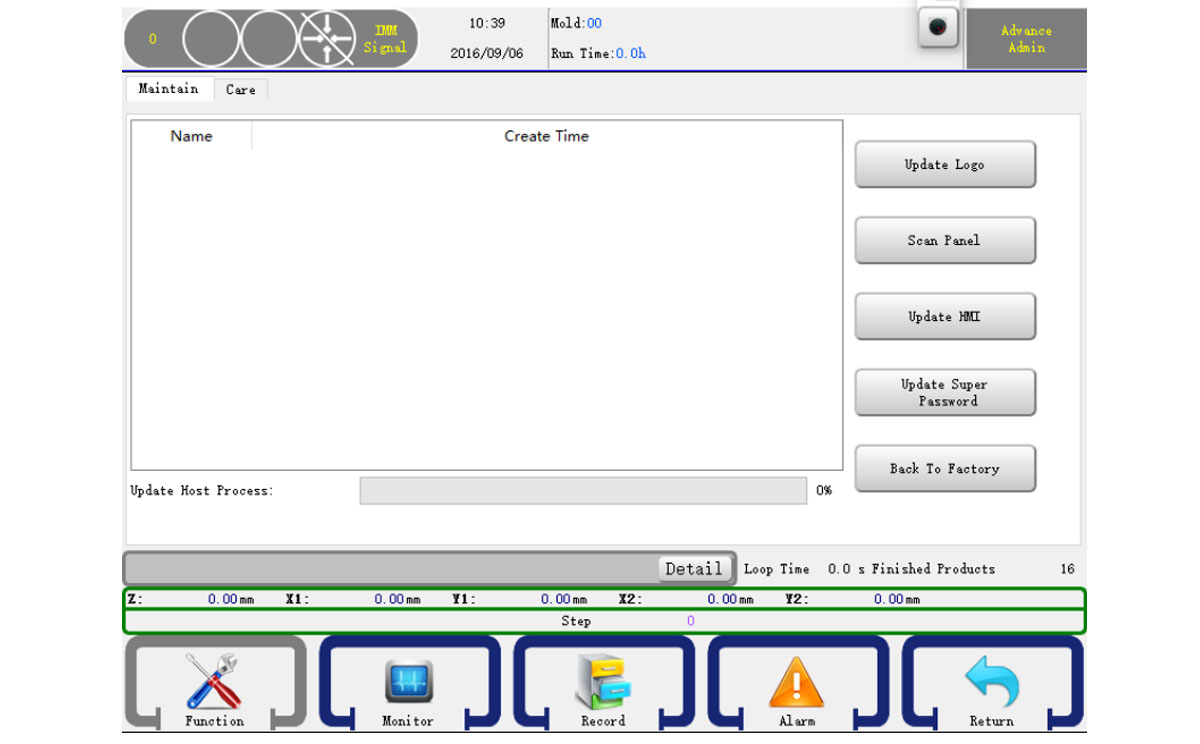
คุณสามารถอัปเดตระบบแผงควบคุมผ่าน USB ได้ โดยใส่แพ็กเก็ตอัปเดตระบบลงในดิสก์ U คลิกปุ่มรีเฟรชและรอสักครู่ ระบบจะแสดงเวอร์ชันของระบบ หากสามารถตรวจสอบแพ็กเก็ตอัปเดตระบบจากดิสก์ได้ หากตรวจสอบไม่ได้ ให้กดปุ่มรีเฟรชอีกครั้งหรือใช้ดิสก์ U อื่น หากตรวจสอบแพ็กเก็ตอัปเดตระบบแล้ว ให้คลิกปุ่มอัปเดตเพื่อเริ่มการอัปเดตระบบ หลังจากเสร็จสิ้น ระบบจะแสดงข้อความและระบบจะรีสตาร์ท จากนั้นคุณสามารถถอดดิสก์ U ออกได้
ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
SWITEK ใหม่ 12 ฟันผุ Take Away ถ้วยฝาปิดระบบการกดเริ่มต้นสำหรับการผลิต
หุ่นยนต์ IML 2 ช่อง SWITEK สำหรับถังขนาด 10 ลิตร พร้อมสำหรับการทดสอบแล้ว
K-Fair 2022 ไฮไลท์ที่ฮอลล์ 15
Arburg จัดแสดงระบบ IML ถัง 1Litter 2 ช่องพร้อมชุดมือจับในปี 2012
เครื่องฉีดพลาสติกไฮบริดซีรีส์ Jenius รุ่น K-2022 จาก Zhafir On Show
NPE 2024 -- ชาวเฮติจัดแสดงเครื่องฉีดขึ้นรูปแบบสองแท่นรุ่น Jupiter Series รุ่นที่ 5
CONAIR จัดแสดงระบบการให้อาหารแบบรวมศูนย์ใหม่พร้อมเทคโนโลยี AI ในงาน NPE 2024
K-2022 โซลูชั่น IML แบบครบวงจรของ Yizumi On Show พร้อมเครื่องฉีดพลาสติกไฟฟ้าความเร็วสูง PAC250E
K-Fair 2022 NESSI & NEGRIBOSSI จัดแสดงนิทรรศการร่วมกัน
NPE 2024 -- WITTMANN นำเสนอโซลูชั่นเพื่อสาธิต "IT's All WITTMANN
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right










