
sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869
คำสำคัญ:หุ่นยนต์ IML; การใช้งานหุ่นยนต์ IML; หุ่นยนต์ติดฉลากในแม่พิมพ์
ส่วน "การสอน" คือส่วนที่คุณสามารถตรวจสอบและแก้ไขโปรแกรมของหุ่นยนต์ IML ได้ เนื่องจากเป็นระบบควบคุมที่ออกแบบมาแบบโมดูลาร์ หลังจากเลือกโหมด ตั้งค่าพารามิเตอร์ ตั้งค่าตัวจับเวลา ตั้งค่าตัวนับแล้ว คุณจะได้รับโปรแกรมเริ่มต้นสำหรับโครงการ IML ของคุณ ในหน้า "การสอน" คุณสามารถทำการปรับแต่งเล็กน้อยของโปรแกรมเพื่อให้หุ่นยนต์ IML ทำงานได้อย่างมีประสิทธิภาพมากขึ้น
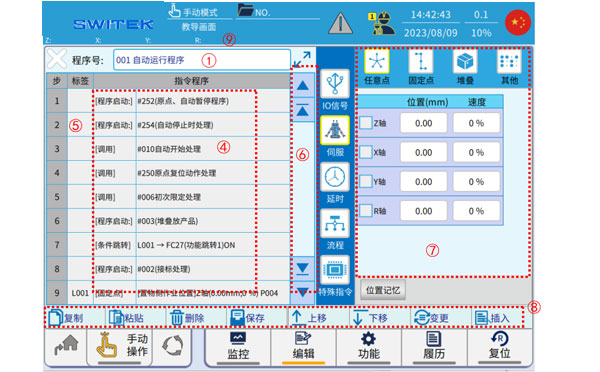
คำอธิบายของแต่ละพื้นที่ทำเครื่องหมาย:
| เลขที่ | ชื่อ | การทำงาน |
|---|---|---|
| (1) | การเลือก/แสดงผลโปรแกรม | คลิกที่หน้าต่างป๊อปอัพ "รายการโปรแกรม" เลือกหมายเลขโปรแกรมที่คุณต้องการเพิ่ม แก้ไข หรือดู แล้วคลิกเพื่อเข้าสู่หน้าจอแก้ไข |
| (2) | การแสดงผลส่วนขยายโปรแกรม | คลิก  เพื่อเข้าสู่ส่วนติดต่อผู้ใช้แบบขยายของหน้าจอแสดงโปรแกรม เพื่อให้สามารถสังเกตเนื้อหาคำสั่งทั้งหมดได้อย่างง่ายดาย เพื่อเข้าสู่ส่วนติดต่อผู้ใช้แบบขยายของหน้าจอแสดงโปรแกรม เพื่อให้สามารถสังเกตเนื้อหาคำสั่งทั้งหมดได้อย่างง่ายดาย |
| (3) | กลับ | คลิกเพื่อออกจากหน้าจอแก้ไขบทช่วยสอน หากโปรแกรมมีการเปลี่ยนแปลง โปรแกรมจะแจ้งให้คอมไพล์ใหม่ |
| (4) | เนื้อหาคำแนะนำ | เนื้อหาของคำสั่งจะถูกแสดงขึ้น |
| (5) | คอลัมน์ป้ายกำกับ | ไปที่พื้นที่แก้ไขของแท็บ คลิกเพื่อเพิ่มป้ายกำกับก่อนบรรทัดคำสั่ง (เมื่อสร้างป้ายกำกับใหม่ คุณสามารถคลิก "EN" โดยไม่ต้องป้อนหมายเลข และระบบจะเพิ่มหมายเลขป้ายกำกับที่ไม่ได้ใช้โดยอัตโนมัติ) |
| (6) | รายการคำแนะนำระดับแรก |
|
| (7) | รายการคำสั่งรองและการตั้งค่าพารามิเตอร์ | การแก้ไขคำสั่งย่อยและการตั้งค่าพารามิเตอร์ |
| (8) | ทางลัดการแก้ไขคำสั่ง |
|
| (9) | การแสดงตำแหน่งแกน | ตำแหน่งปัจจุบันของแต่ละแกนจะแสดงขึ้นเพื่อให้สังเกตได้ง่าย |
รายละเอียดด้านล่างนี้คือวิธีการ "สอน" โปรแกรมหุ่นยนต์ IML:
คลิกที่ช่องแสดงชื่อโปรแกรมเพื่อเข้าสู่รายการโปรแกรม
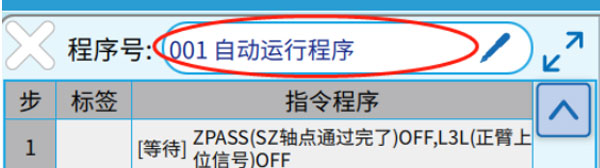
อินเทอร์เฟซมีดังต่อไปนี้:
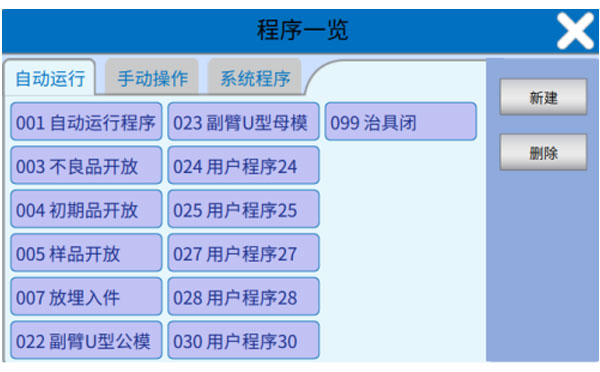
โปรแกรมทำงานอัตโนมัติ (001-099): 001 คือโปรแกรมหลักที่ผู้ใช้สามารถแก้ไขได้ ส่วน 024-083 คือโปรแกรมย่อยที่ผู้ใช้สร้างและแก้ไข
การใช้งานด้วยตนเอง (#178-#249):
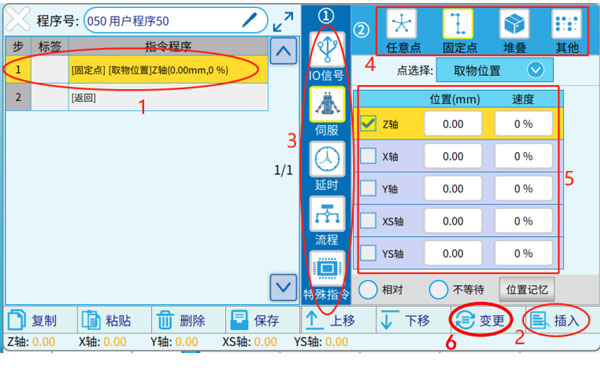
หน้าจอการแก้ไขแสดงดังรูปด้านบน และบรรทัดคำสั่งใหม่จะแบ่งออกเป็น 6 ขั้นตอนดังต่อไปนี้:
ด้านล่างนี้คือคำสั่งที่ใช้บ่อยที่สุดบางส่วน:
ในการสอนการเขียนโปรแกรมแอปพลิเคชัน ไม่แนะนำให้ผู้ใช้แก้ไขตรรกะจุด X และ Y พื้นฐานสำหรับการควบคุม IO มาตรฐานของเครื่องฉีดขึ้นรูปและหุ่นยนต์ (ในที่นี้คือ IML Robot) และควรเรียกใช้ฟังก์ชันย่อยของระบบเพื่อให้มั่นใจในความถูกต้องของโปรแกรม ฟังก์ชันย่อยเหล่านี้อยู่ในคลาส "IO Signals"
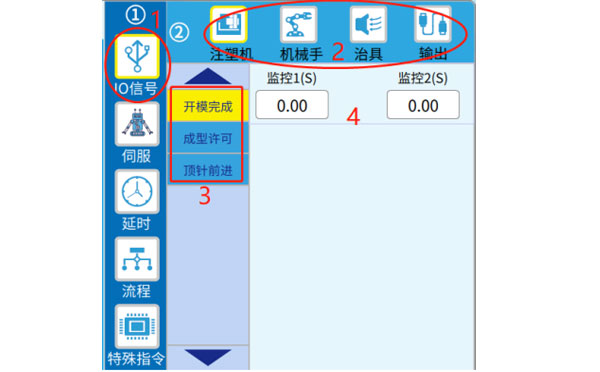
ดังแสดงในรูปด้านบน ขั้นตอนการเขียนโปรแกรมจะถูกกำหนดทีละขั้นตอนตาม 1 (หมวดหมู่หลัก) 2 (หมวดหมู่ย่อย) 3 (คำสั่งเฉพาะ) และ 4 (พารามิเตอร์เฉพาะ) และหลังจากเสร็จสิ้นแล้ว ให้คลิก "เปลี่ยน" หรือ "แทรก"
เมื่อแก้ไขฟังก์ชันอำนวยความสะดวกที่เกี่ยวข้องกับหุ่นยนต์ IML คุณสามารถใช้ปุ่มในรูปต่อไปนี้เพื่อใช้งาน อุปกรณ์จับยึดที่เกี่ยวข้องกับหุ่นยนต์ IML (คุณสามารถสังเกตการเปิด/ปิดสัญญาณตรวจจับได้โดยการเปิดหรือปิดจุดทางด้านขวา)  ) ซึ่งสะดวกในการตั้งโปรแกรมจำลองสถานการณ์การใช้งานจริง
) ซึ่งสะดวกในการตั้งโปรแกรมจำลองสถานการณ์การใช้งานจริง

ในการแก้ไขตรรกะเอาต์พุตของจุด I/O อินเทอร์เฟซการแก้ไขมีดังต่อไปนี้:
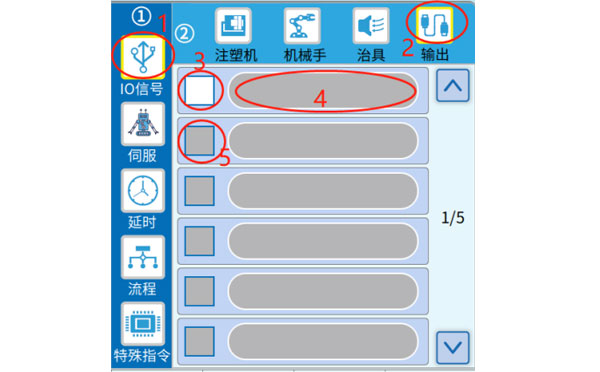
ในหน้าจอแก้ไขของรูปด้านบน ให้คลิกที่หมายเลข 3 เพื่อ ☐ เครื่องหมาย 4 จะสามารถแก้ไขได้ เลือก จุด Y เปิดหรือปิดที่จะส่งออก แล้วยืนยัน หากคุณต้องการส่งออกจุด Y ของหุ่นยนต์ IML พร้อมกัน ที่ตัวกำหนด 5 ☐ เพื่อเริ่มแก้ไขการส่งออกจุด Y ที่สอง เมื่อเสร็จแล้ว ให้คลิก "เปลี่ยน" หรือ "แทรก"
แก้ไขคำสั่งการเคลื่อนที่ของแกนเซอร์โว รวมถึงการเคลื่อนที่ไปยังจุดคงที่ (จุดถูกกำหนด สามารถแก้ไขได้ใน "การตั้งค่าตำแหน่ง" และสามารถอ้างอิงได้) จุดใดก็ได้ จุดซ้อน (ตำแหน่งถูกตั้งค่าใน "จุดซ้อน" ในเมนู) และคำสั่งให้แกนกลับไปยังจุดเริ่มต้น เป็นต้น ยกตัวอย่างเช่น จุดคงที่:
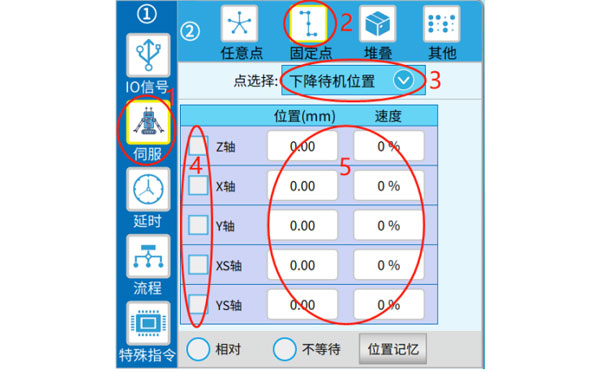
ดังแสดงในรูปด้านบน ให้เลือกจุดเฉพาะที่ป้ายกำกับ 3 จากนั้นเลือกแกนที่จะใช้งานที่ป้ายกำกับ 4 และตั้งค่าจุด และความเร็วที่ป้ายกำกับ 5 เมื่อเสร็จแล้ว ให้คลิก "เปลี่ยน" หรือ "แทรก"
คำสั่งหน่วงเวลาในการแก้ไขมีสองประเภท ได้แก่ การระบุเวลาและการระบุตัวจับเวลา (สามารถเปลี่ยนเวลาของตัวจับเวลาได้ เมื่อทำงานโดยอัตโนมัติ)
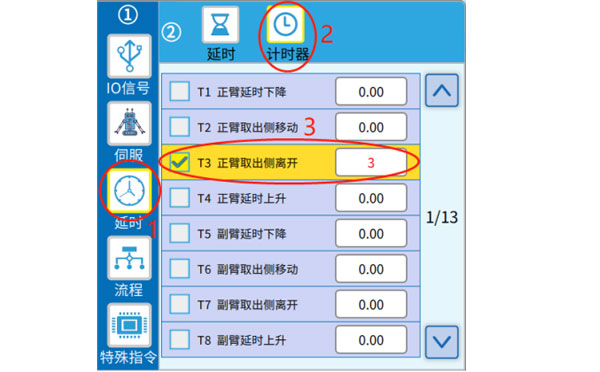
หมายเหตุ: หากคุณต้องการใช้ตัวจับเวลาในการสอนการเขียนโปรแกรม ควรเลือกใช้ T85-T100 ซึ่งเป็นตัวจับเวลาแบบผู้ใช้ที่ไม่ได้รับการกำหนดค่าอย่างเฉพาะเจาะจง
การเรียกใช้และการเริ่มต้นโปรแกรมต่างก็เป็นวิธีการใช้ซับรูทีน ความแตกต่างคือ เมื่อมีการเรียกใช้ซับรูทีน มันจะรอจนกว่าการทำงานของคำสั่งในซับรูทีนจะสิ้นสุดลง (จนถึงคำสั่ง "return") และการเรียกใช้จะถือว่าเสร็จสมบูรณ์ และคำสั่งถัดไปในโปรแกรมหลักสามารถดำเนินการได้ ในทางกลับกัน คุณไม่จำเป็นต้องรอให้การเริ่มต้นซับรูทีนทำงานเสร็จ และคุณสามารถเริ่มต้นขั้นตอนถัดไปของโปรแกรมหลักได้โดยตรง (โปรแกรมหลักและซับรูทีนจะทำงานพร้อมกัน)
ขั้นตอนในการแก้ไขคำสั่งเริ่มต้นโปรแกรมมีดังนี้:
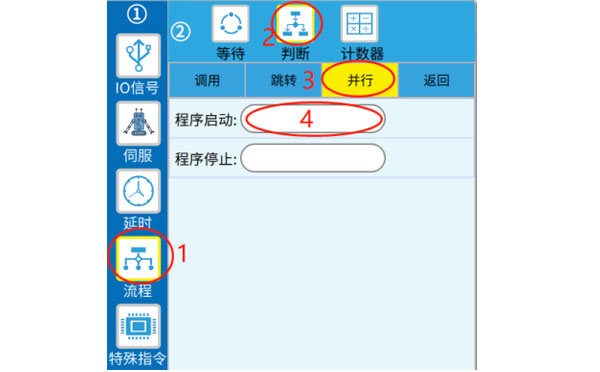
หมายเหตุ: โปรแกรมจะเริ่มต้นโปรแกรมย่อยที่เปิดอยู่ ซึ่งสามารถปิดได้โดยใช้ "หยุดโปรแกรม" ด้านบน (โดยปกติแล้ว โปรแกรมย่อยจะปิดโดยอัตโนมัติหลังจากเสร็จสิ้นการทำงานและถึงคำสั่ง "return")
ขั้นตอนในการแก้ไขคำสั่งเรียกใช้งานมีดังนี้:
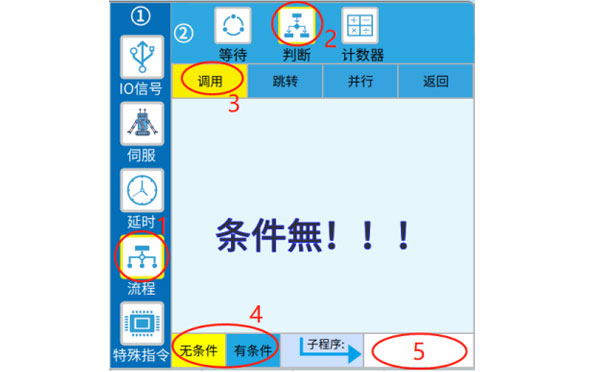
ดังแสดงในไอคอนหมายเลข 4 ด้านบน เมื่อแก้ไขคำสั่งเรียก คุณสามารถเลือกได้ว่าจะตั้งเงื่อนไขหรือไม่ ให้เลือก "ไม่มีเงื่อนไข" จากนั้นตั้งหมายเลขซับรูทีนที่จะเรียกที่เครื่องหมาย 5 เพื่อทำการเรียกให้เสร็จสมบูรณ์ หากคุณเลือก "มีเงื่อนไข" คุณจะต้องตั้งค่าเงื่อนไขให้เสร็จก่อน จากนั้นตั้งหมายเลขโปรแกรมที่ป้ายกำกับ 6 แล้วคลิก "เปลี่ยน" หรือ "แทรก"
โปรดทราบว่าเมื่อการตัดสินแบบมีเงื่อนไขก่อนหน้านี้ไม่เป็นจริง การเรียกใช้ครั้งต่อไปจะไม่ถูกดำเนินการ แต่คำสั่งบรรทัดถัดไปจะเริ่มต้นขึ้น
คำสั่ง Jump: โปรแกรมจะถูกเรียกใช้งานจนถึงคำสั่ง jump และขั้นตอนถัดไปจะเรียกใช้คำสั่งบรรทัดคำสั่งที่มีแท็กที่เกี่ยวข้อง แทนที่จะเรียกใช้งานตามลำดับถัดไป
การกระโดด/การกระโดดแบบมีเงื่อนไข ขั้นตอนการแก้ไขคำสั่งมีดังนี้:

เลือกว่าคุณต้องการตั้งเงื่อนไขในป้ายกำกับที่ 4 หรือตั้งเงื่อนไขในป้ายกำกับที่ 5 (คุณสามารถตั้งเงื่อนไขได้หลายเงื่อนไข) ตั้งหมายเลขป้ายกำกับในป้ายกำกับที่ 6 และเลือก "เปลี่ยน" หรือ "แทรก" เพื่อสร้างคำสั่ง จากนั้นกรอกข้อมูลในคอลัมน์ป้ายกำกับที่แสดงในป้ายกำกับที่ 7 ก่อนบรรทัดคำสั่งเป้าหมาย
หากใช้การกระโดดแบบ "มีเงื่อนไข" การตัดสินเงื่อนไขก่อนหน้านี้จะไม่ถูกต้อง และการกระโดดครั้งต่อไปจะไม่ถูกดำเนินการ และบรรทัดคำสั่งถัดไปจะเริ่มต้นโดยตรง หากเงื่อนไขเป็นจริง ให้เรียกใช้บรรทัดคำสั่งที่กระโดดไปยังป้ายกำกับ
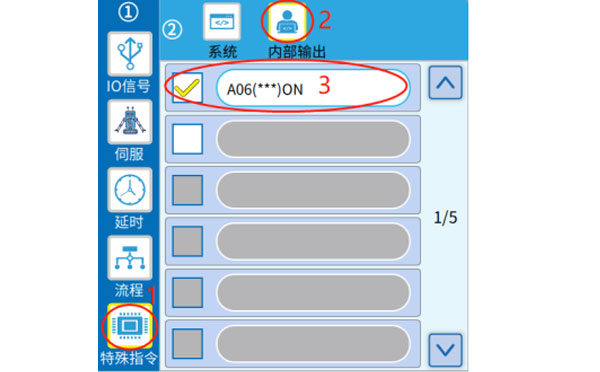
เอาต์พุตของแฟล็กภายในคือ เปิด/ปิด และขั้นตอนการแก้ไขแสดงอยู่ในหมายเลขไอคอนด้านล่าง
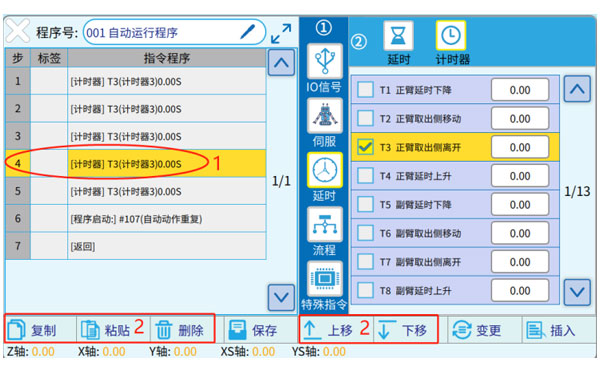
ดังแสดงในไอคอนหมายเลข 1 ด้านบน ให้เลือกบรรทัดคำสั่งที่คุณต้องการแก้ไข (เปลี่ยนเป็นสีเหลือง) จากนั้นใช้ปุ่มที่ป้ายกำกับ 2 เพื่อดำเนินการ
ฟังก์ชันของแต่ละปุ่มมีดังนี้:
เมื่อแก้ไขโปรแกรมเสร็จแล้ว คุณสามารถคลิก "บันทึก" หรือ " " หรือไปที่หน้าการตั้งค่าอื่นๆ เพื่อเรียกใช้ข้อความแจ้ง "การคอมไพล์" คลิก "ใช่" และรอจนกว่าการแก้ไขจะเสร็จสมบูรณ์ (โปรแกรมจะถูกบันทึกโดยอัตโนมัติหลังจากคอมไพล์เสร็จ)
" หรือไปที่หน้าการตั้งค่าอื่นๆ เพื่อเรียกใช้ข้อความแจ้ง "การคอมไพล์" คลิก "ใช่" และรอจนกว่าการแก้ไขจะเสร็จสมบูรณ์ (โปรแกรมจะถูกบันทึกโดยอัตโนมัติหลังจากคอมไพล์เสร็จ)

สลับปุ่มที่มุมบนซ้ายของจี้ควบคุมเพื่อเข้าสู่โหมดอัตโนมัติ ไปที่การสอน ดังแสดงด้านล่าง และคลิกที่ไอคอน " " ที่แสดงใน ป้ายกำกับ 1 เพื่อเข้าสู่หน้าจอแสดงผลแบบขยาย คลิกที่ป้ายกำกับ 2 "ขั้นตอนเดียว" เพื่อเข้าสู่สถานะขั้นตอนเดียว กดปุ่มป้ายกำกับ 3 " " หนึ่งครั้ง และโปรแกรมจะเลื่อนลงไปที่ 1 ขั้นตอน
" หนึ่งครั้ง และโปรแกรมจะเลื่อนลงไปที่ 1 ขั้นตอน
สามารถดูความคืบหน้าของโปรแกรมได้ที่หมายเลข 4 "หมายเลขโปรแกรม" คือหมายเลขของโปรแกรมที่กำลังทำงาน และ "หมายเลขขั้นตอน" คือ หมายเลขของโปรแกรมที่กำลังทำงาน

ไอเอ็มแอล เทคโนโลยี เอ็กซ์เพรส
YIZUMI Machinery มุ่งเน้นที่เศรษฐกิจหมุนเวียน โดยส่งเสริมเครื่องฉีดพลาสติกแบบไฟฟ้าทั้งหมดเพื่อลดการใช้พลังงานต่อกิโลกรัมให้เหลือน้อยที่สุด
Fakuma 2023 - - Nestal on Show Elion 1750 เครื่องฉีดขึ้นรูปแบบไฟฟ้าทั้งหมดพร้อมโซลูชัน IML แบบครบวงจร
NPE 2024, ChenHsong Machinery นำเสนอโซลูชั่น IML แบบครบวงจร
NPE 2024 -- Yushin จัดแสดงหุ่นยนต์ขนาดใหญ่ซีรีส์ MKA
Fakuma 2024 จะเปิดตัวในวันที่ 15 ตุลาคม 2024 ที่เมืองฟรีดริชชาเฟิน ประเทศเยอรมนี
SWITEK กำลังทดสอบระบบ IML ทางเข้าด้านบนสำหรับถังสีขนาด 20 ลิตรภายในบริษัท
NPE 2024 -- ชาวเฮติจัดแสดงเครื่องฉีดขึ้นรูปแบบสองแท่นรุ่น Jupiter Series รุ่นที่ 5
วิศวกร SWITEK เสร็จสิ้นการติดตั้งแมกกาซีนใหม่ในประเทศชิลี
การประกอบหุ่นยนต์ IML รุ่นใหม่ของ SWITEK สำหรับการห่อ + ติดฉลากด้านล่างเสร็จเรียบร้อยแล้ว
หุ่นยนต์ IML ใหม่สำหรับหลอดเครื่องสำอางของ SWITEK กำลังได้รับการทดสอบภายในองค์กร
ติดต่อ SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
เครื่องจักรฉีด
ติดตามฉัน





HuangYanZheng©Copy Right





